
A fékrendszer pneumatikus meghajtása. Általános információk a hidraulikus és pneumatikus hajtásokról
A pneumatikus hajtások kezdeti energiája a sűrített levegő energiája. A pneumatikus aktuátort széles körben használják a lámpatestekben sebessége (működési sebesség - a másodperc töredékei), a tervezés egyszerűsége, a könnyű és egyszerű vezérlés, valamint a megbízhatóság és a működés stabilitása miatt. Ugyanakkor a pneumatikus működtetőnek vannak hátrányai - a rúd egyenetlen mozgása, alacsony légnyomás és zaj a kipufogó levegő felszabadulásakor.
A pneumatikus hajtás a következő részekből áll: sűrített levegő forrás - általában műhely vagy gyári kompresszor egység; tápegység - pneumatikus motor, amely a sűrített levegő energiáját W erővé alakítja a rúdon; pneumatikus berendezések - vezérlőeszközök, elosztó, biztonsági berendezések stb.; légcsatornák.
A pneumatikus motor egy kivitelben van elrendezve a készülékkel. A többi készülék a készüléken kívül helyezkedik el, légcsatornák segítségével csatlakozik a készülékhez.
A pneumatikus motorok három fajta- dugattyú (pneumatikus hengerek, 2.59. ábra, a), membrán (pneumatikus kamrák, 2.59. ábra, b) és harmonika (2.59. ábra, c).
Rizs. 2.59. Légmotorok típusai
A pneumokamrák két öntött vagy préselt csészéből álló szerkezetek, amelyek közé acélból vagy gumírozott szövetből készült rugalmas membránt szorítanak. A harmonikamotor munkaürege egy hullámos zárt kamra 1, amely vékony korrózióálló acélból, sárgarézből vagy foszforbronzból készül, és sűrített levegő hatására rugalmasan tágul a 2 rúd löketének irányában. A fordított löketet akkor hajtjuk végre, amikor a 3 kamrán belül levegőt táplálunk be. A pneumatikus kamra rúd és a csőmembrán munkalöketét ezért korlátozza a lehetséges rugalmas deformáció nagysága, míg a pneumatikus hengernél ez bármilyen lehet. A munkaüregek tömítésére szolgáló pneumatikus henger tömítéseket igényel a dugattyún és a rúdon, amelyek meglehetősen gyorsan elhasználódnak (általában élettartamuk nem haladja meg a 10 ezer ciklust), a membránok tartósabbak - akár 600 ezer ciklusig. A harmonika nem igényel tömítést.
A tömítések a légmotorok kritikus szerkezeti elemei. Szükségesek a dugattyú és a henger, a rúd és a fedél közötti gyűrű alakú hézagokban, valamint a rögzített csatlakozásokban, ahol levegőszivárgás lehetséges. A modern pneumatikus motorokban kétféle tömítést használnak (2.59. ábra, a): 1 - V-alakú mandzsetta olajálló gumiból a GOST 6969-54 szerint a dugattyúk és rudak tömítésére, 2 - O-gyűrűk olajálló gumi a GOST 9833-73 szerint dugattyúk, rudak és rögzített kötések tömítéseihez.
Ezenkívül eredeti, többüléses, cső alakú membrános eszközöket használnak. A csövek végeit dugók zárják le, és az egyik dugóba egy sűrített levegő ellátására szolgáló idomot csavarnak. Sűrített levegő beengedésekor a 3. membrán (2.60. ábra, a) kitágul, összenyomja a 2 rugókat, és mozgatja az 1 dugattyúkat, rögzítő alkatrészeket. A levegő kiengedésekor a dugattyúk a rugók hatására visszatérnek eredeti helyzetükbe.
n1.docx
1. Pneumatikus működtetők. Pneumatikus hengerek, forgó- és turbinás pneumatikus motorok.Pneumatikuseszköz- olyan berendezésnek nevezik, amelyben sűrített gázt használnak munkaközegként, fizikai tulajdonságok a gázok nyomás formájában jelennek meg a készülék szilárd láncszemeinek felületén, vagy aerodinamikai hatások formájában.
Pneumatikus hajtás egymással összekapcsolt pneumatikus eszközök rendszere, amelyet a gépek munkatesteinek vagy a mechanizmusok munkadarabjainak mozgásba hozására terveztek. A hajtásokban lévő pneumatikus eszközök pneumatikus vezetékekkel (csővezetékekkel) és mechanizmusokkal (csuklós kar, fogaskerék, bütyök stb.) összekapcsolhatók.
Végrehajtó az eszközöket arra tervezték, hogy a sűrített levegő energiáját a gép munkatesteinek mozgási energiájává alakítsák.
A legelterjedtebb volumetrikus pneumatikus motorok (dugattyús, forgó- és kamrás (ballon)).
A pneumatikus motor különféle szerszámok (fúrók, csavarkulcsok, légkalapácsok, csiszolófejek), a munkavégzés biztonságának biztosítása robbanásveszélyes helyeken (gáz, szénpor felhalmozódásával), magas nedvességtartalmú környezetben.
2. A pneumatikus hajtóművek alapelemei és diagramjai.
Pneumatikus hajtás - olyan eszközök összessége, amelyek a gépek és mechanizmusok sűrített levegő energiájával történő mozgásba hozására szolgálnak. A pneumatikus aktuátor kötelező elemei egy kompresszor (pneumatikus energiagenerátor) ill légmotor .
A pneumatikus hajtás, valamint a mechanikus erőátvitel fő célja a hajtómotor mechanikai jellemzőinek átalakítása a terhelés követelményeinek megfelelően (a motor kimeneti láncszemének mozgástípusának, paramétereinek átalakítása) , valamint szabályozás, túlterhelés elleni védelem stb.).
Általánosságban elmondható, hogy a pneumatikus működtetőben az energiaátvitel a következőképpen történik:
A hajtómotor nyomatékot ad át a kompresszor tengelyére, amely energiával látja el a munkagázt.
A munkagáz speciális előkészítést követően pneumatikus vezetékeken keresztül a vezérlőberendezésen keresztül jut be a légmotor ahol a pneumatikus energia mechanikai energiává alakul át.
Ezt követően a munkagáz a környezetbe kerül, ellentétben a hidraulikus hajtással, amelyben munkafolyadék a hidraulika vezetékeken keresztül vagy a hidraulikatartályba, vagy közvetlenül a szivattyúba jut vissza.
A pneumatikus működtető szerkezet tipikus diagramja
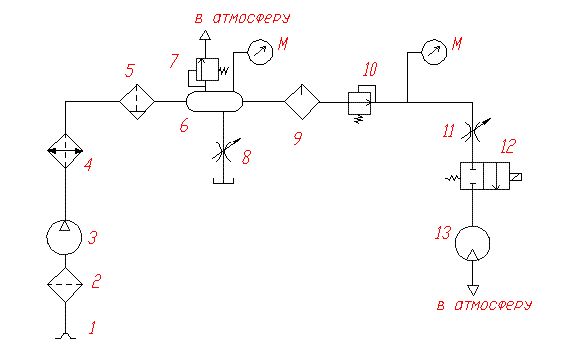
A pneumatikus hajtás tipikus sémája: 1 - légbeömlő; 2 - szűrő; 3 - kompresszor; 4 - hőcserélő (hűtőszekrény); 5 - párátlanító; 6 - levegő gyűjtő (vevő); 7- biztonsági szelep; 8- Fojtószelep; 9 - olaj permetező ; 10 - nyomás csökkentő szelep; 11 - fojtószelep; 12 - elosztó; 13 pneumomotor; M - manométer.
A levegő ezen keresztül jut be a pneumatikus rendszerbe légbeömlő .
A szűrő tisztítja a levegőt a hajtóelemek károsodásának elkerülése és kopásuk csökkentése érdekében.A kompresszor összenyomja a levegőt.
Mivel Charles törvénye szerint a kompresszorban sűrített levegőnek van magas hőmérsékletű, majd a fogyasztók (általában légmotorok) levegőbe juttatása előtt a levegőt hőcserélőben (hűtőszekrényben) lehűtik A levegőmotorok jegesedésének megakadályozására a bennük lévő levegő tágulása miatt, valamint az alkatrészek korróziójának csökkentésére, a párátlanító.A légkollektor a sűrített levegő utánpótlás létrehozására, valamint a pneumatikus rendszer nyomáspulzációinak kiegyenlítésére szolgál. Ezek a lüktetések a térfogati kompresszorok (például dugattyús) működési elve miatt következnek be, amelyek adagokban szállítják a levegőt a rendszerbe. olajadagoló kenést adnak a sűrített levegőhöz, ami csökkenti a súrlódást a pneumatikus hajtás mozgó részei között, és megakadályozza azok elakadását.
A pneumatikus hajtóművet be kell szerelni nyomás csökkentő szelep, amely állandó nyomáson sűrített levegőt biztosít a pneumatikus motorokhoz.
Az elosztó vezérli a levegőmotor kimeneti linkjeinek mozgását.
A pneumatikus motorban (pneumomotor vagy pneumatikus henger) a sűrített levegő energiája mechanikai energiává alakul.
3. Pneumatikus kapcsolóberendezések.
A pneumatikus visszacsapó szelepeket úgy tervezték, hogy a sűrített levegőt csak egy irányba engedjék át (5.25. ábra). A 3. szelep a 2. házban található, és szabad állapotban egy rugó nyomja 4
az üléshez (az 5-ös furatból az 1-es nyílásba zárva van) 1 . Amikor levegőt juttatnak a nyílásba / szelep 3 eltávolodik az üléstől, megnyitva a járatot a kilökődéshez 5 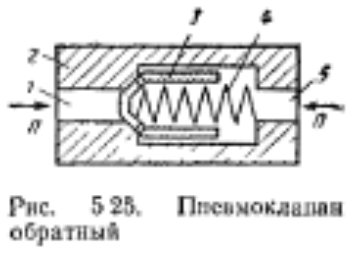
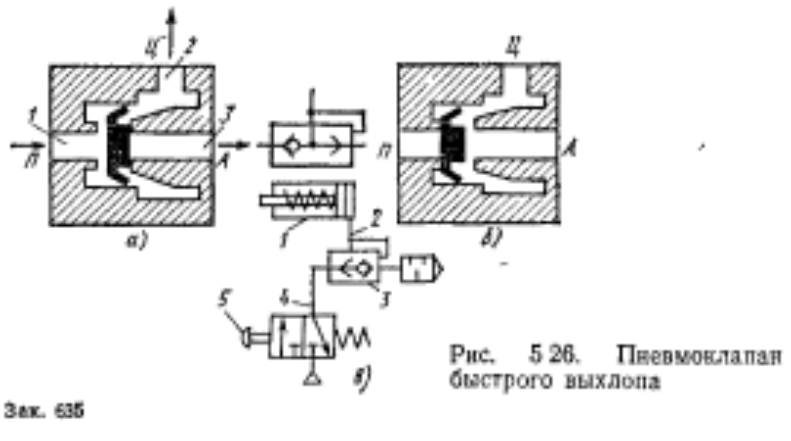
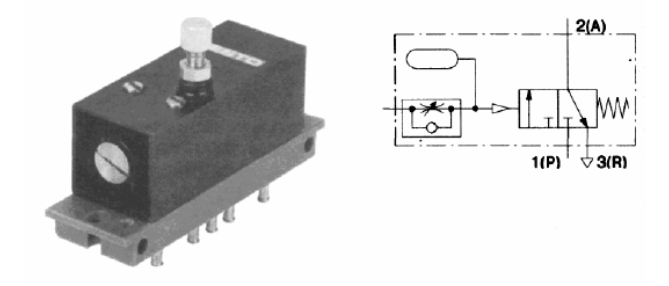
Gyors kipufogószelep(5.20. ábra) a pneumatikus működtetők sebességének növelését szolgálja a kipufogóvezeték ellenállásának csökkentésével. Egy ilyen szelep használata (5. ábra 26, c) növeli a pneumatikus hengerrúd / mező visszahúzási sebességét a rugó hatására. Az 5 nyomáselosztó bekapcsolásakor a sűrített levegő áthalad a 7 gyorselszívó szelepen, amely a csővezeték mentén a henger dugattyújának üregébe jut. 2 % lehetővé téve a dugattyú balra mozgását.
Amikor az 5 pneumatikus elosztó ki van kapcsolva, a nyomás a csővezetékben 4 leesik, a gyors kipufogószelep átkapcsol, biztosítva a levegő kijutását a léghenger üregéből a légkörbe, megkerülve a csővezetéket 4 to iisvmorraspredsligel 5.
ábrán. Az 5.26a ábrán egy arxewa gyors kipufogószelep látható. Lyuk 2 szelep a henger üregéhez van rögzítve. Az elosztóból lekerekített levegő a / nyílásba kerül. A 3. lyuk a légkörhöz kapcsolódik. ábrán. 5.26, o a gyors kipufogó szelep helyzetét mutatja, amikor a pneumatikus henger ürege meg van töltve sűrített levegővel. ábrán. 5.26.6 mutatja a szelep helyzetét a kalmandra ugyanazon üregének gyors ürítése közben.
Pneumoklalánok szekvenciájaÚgy tervezték, hogy a működési ciklust nyomással (nyomáskülönbséggel) szabályozza a pneumatikus vezérlőrendszerekben, pneumatikus jelet adva, amikor a szabályozott nyomás (nyomáskülönbség) egy előre meghatározott értékre emelkedik. Az ilyen szelepeket pneumatikusan vezérelt egységek kapcsolására is használják olyan rendszerekben, ahol nem használhatók végálláskapcsolók (például változtatható dugattyúlökettel).
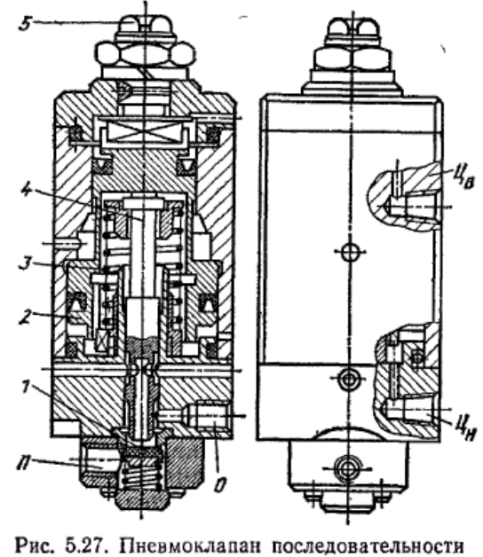
ábrán. Az 5.27. ábra egy aktív sorrendű szelep felépítését mutatja. A henger dugattyújának mozgása előtti és közbeni téves jelzés elkerülése érdekében 2 differenciáldugattyú van kialakítva, amelynek üregei kommunikálnak a nyomással (Ts p lyuk) és a kipufogóval (lyuk). C th ) hengerüregek. Mivel a mozgás megkezdése előtt és a henger dugattyújának mozgása közben a nyomáskülönbség az üregeiben kisebb, mint a löket vége után, a differenciáldugattyú 2 on- Rice. 5.27. A szekvencia pneumoszelep biztonságosan be van tartva
felső helyzet rugóval 3, állítható csavarral 5, és nyomás a kipufogó üregében, amely a dugattyú nagy területére hat 2.
Miután a henger dugattyúja a szélső helyzetbe került és megáll, a nyomáskamrában a nyomás egyenlő lesz a vezetékben, a kipufogó üregében pedig légköri nyomással. Ennek eredményeként a 2 dugattyú, legyőzve a 3 rugó hatását, lefelé mozog és áthalad a tolón. 4 összekeveri az Y szelepet, ezáltal a 0 kimenetét a teljesítménycsatornához köti P. A kimenet pneumatikus jelet állít elő, amely felhasználható ennek a pneumatikus hengernek a megfordítására vagy a vezérlésére kismalac séma elemek.
4 Pneumatikus készülékek
A pneumatikus eszközöket a nyomás és a légáramlás szabályozására tervezték. A céltól függően a következő kategóriákba sorolhatók
elosztók információs (bemeneti) eszközei, logikai számítástechnikai eszközök és teljesítményerősítők.
ellenőrizd a szelepeket.
áramlásszabályozók,
nyomásszelepek
elzáró szelepek
A forgalmazók eltérőek
a csatlakoztatott vonalak számával 2-lineáris. lineáris. 4 soros stb.
a kapcsolási állások számának megfelelően 2 állás 3 állás stb.
a meghajtás módja szerint izomvezérléssel mechanikus vezérléssel pneumatikus vezérléssel elektromos vezérléssel
rugós visszatéréssel történő visszaállítás módszere szerint, nyomással történő visszaállítással
23. ábra - Görgőkaros szelep, 3/2 görgőkaros törhető szelep
Logikai számítástechnikai eszközként az elosztót például a kimeneti jel kikapcsolására vagy kikapcsolására használják, amelyet a bemeneti jel hatására hajtanak végre.
rizs 2 5 Pneumatikus 5G-elosztó kétoldalas pneumatikus és segédkönyv menedzsment
ellenőrizd a szelepet
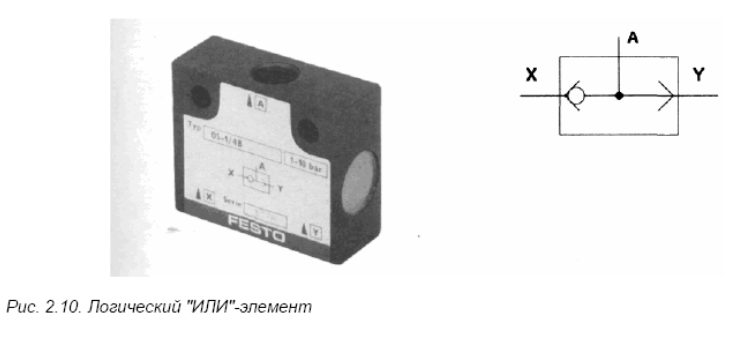
A visszacsapó szelep lehetővé teszi a levegő áramlását csak egy irányban Ezt az elvet alkalmazzák például a gyors kipufogó szelepeknél vagy VAGY logikai elemeknél A visszacsapó szelepet mint alapelemet más típusú szelepeknél is alkalmazzák, amelyek ábrán láthatók a 2-6

2. ábra 6 Visszacsapó szelep és egyéb "szelepek" épültek, de durrannak
Áramlásszabályozók
Az áramlásszabályozó vagy a fojtószelep zárja vagy fojtja a lottót*, és így szabályozza a sűrített levegő áramlását Ideális esetben a fojtószelep fokozatmentesen állítható teljesen nyitott állapotból teljes lezárás A fojtószelepet a szelepmozgatóhoz a lehető legközelebb kell felszerelni és működés közben szükség szerint beállítani.Ha a fojtószeleppel párhuzamosan visszacsapó szelep van csatlakoztatva, akkor a légáramlás az egyik irányban korlátozott lesz, és az áramlás megszakad. legyen maximális az ellenkező irányba.
2 9. ábra Időkésleltető szelep
A fojtószelep-csavar beállításától függően több-kevesebb levegő áramlik be a tartályba. mindaddig, amíg a vezérlőjel aktív A több szeleppel rendelkező egyéb modulok közé tartozik pl
két bemenettel rendelkező vezérlőeszközök,
órajeladók.
óraláncok.
memória eszközök
Az alkatrészek gyártása során a technológiai folyamatok integrált gépesítése és automatizálása a minőség, a termelékenység, a berendezések terhelési tényezőjének, a munkakörülmények és a termelés gazdasági mutatóinak javítását célozza.
A fémforgácsoló gépeken az alkatrészek megmunkálásakor eltöltött segédidő csökkentése érdekében az automatizálást olyan műveleteknek vetik alá, mint a munkadarab beszerelése, rögzítése és eltávolítása, szerszámok cseréje és cseréje, a gépen lévő alkatrészek ellenőrzése, a munkadarabok szállítása és adagolása a munkaterületre, a fémvágó szerszám megtisztítása forgácsoktól és eltávolítása a gépről stb. Ezekre a célokra széles körben elterjedt műszaki rendszerek keresse meg a hidraulikus és pneumatikus hajtóműveket.
A hidraulikus hajtásnak alacsony a mozgó alkatrészek tehetetlensége, ami biztosítja a nagy sebességet, és lehetővé teszi a hajtómű gyors hátramenetét és fékezését. A hidraulikus hajtás tömege és méretei 3-10-szer kisebbek, mint az elektromos hajtásé. Fokozatmentes fordulatszám-szabályozást biztosít, strapabíró, a túlterhelés közbeni törését megakadályozó eszközök kialakítása egyszerű és megbízható. A hidraulikus hajtás megkönnyíti a mozgási ciklusok automatizálását. A hidraulikus motorok hatásfoka 85-95% tartományba esik, ami magasabb, mint az elektromos gépeké.
A CNC gépekben a hidraulikus hajtásokat leggyakrabban előtolási mozgásokban és szervohajtásként használják. A főmozgás láncaiban főleg oda-vissza mozgású gépekben használják. A CNC gépekben általában két teljesítménysémát használnak a hidraulikus motorokhoz: volumetrikus (állítható teljesítményű hidraulikus szivattyúból) és fojtószelep (orsón keresztül). A CNC gépek előtolási sebességének szabályozási tartományának ki kell terjednie a munkaelőtolásokra és a gyors mozgásokra egyaránt. Ez eléri a 10000 mm/perc és afeletti sebességet. Alacsony előtolásnál (1-4 mm/perc) biztosítani kell a mozgások nagy pontosságát és simaságát. A vezérlőrendszertől függően az előtoló hajtások diszkrét (lépcsős) és szervohajtásúak. A léptetős adagolóhajtás nyitott állapotban (anélkül Visszacsatolás) vezérlőrendszerek. A léptető hajtásokban léptetőmotorokat (SM) használnak, amelyek kis teljesítményű (vezérlésű) és teljesítményűek. Az alacsony teljesítményű léptetőmotoros hajtásoknál általában hidraulikus erősítőket használnak nyomatékerősítőként. Ugyanakkor a hidraulikus motor nyomatéka akár 300-szor is meghaladhatja a léptetőmotor nyomatékát.
A forgácsok eltávolításához a szerszámgépekről általában különféle típusú eszközök kombinációit használják. Így például az egyes gépekből származó forgácsokat egy erős hűtőfolyadék sugárral lemossák, és bejutnak a közös csúszdába, amelyen keresztül a kollektorba kerül. A kollektorban a hűtőfolyadékot leválasztják a forgácsról és visszaszivattyúzzák a gépekbe. A forgácseltávolításhoz pneumatikus eszközöket is használnak, amelyek nyomás-, szívó- és szívó-nyomó rendszerrel vannak ellátva.
6. A pneumatikus automatizálás eszközei. Pneumatikus automatizálási sugárrendszerek.
A nagy teljesítményű pneumatikus eszközök mellett a pneumatikus eszközöket is egyre gyakrabban használják az iparban. Elsősorban olyan gépekben alkalmazzák őket, amelyekben kizárólag erőgépes pneumatikus eszközök vannak, hogy elkerülhető legyen a különböző típusú energiafelhasználás.
A pneumatikus vezérlőrendszerek gyári hálózatból történő táplálására három sűrített levegő nyomásszintet használnak:
nagy nyomás (4-10 kgf / cm 2);
közepes nyomás (1-4 kgf / cm 2);
alacsony nyomás (legfeljebb 1 kgf / cm 2) -. Ennek megfelelően a pneumatikus automatizálási eszközök három csoportra oszthatók.
7 logikai számítási elem (processzorok)
Az információs elemek kimenőjelének logikai feldolgozásához például különféle reléelemeket használnak
logikai "ÉS" - elem,
logikai *OR* elem
Az információkat feldolgozó pneumatikus processzorok továbbfejlesztése a létrehozás felé halad moduláris rendszerek, amelyek egy 6 rétegben egyesítik az elosztókat és a logikai elemeket Ez csökkenti a beépítés méretét és költségét 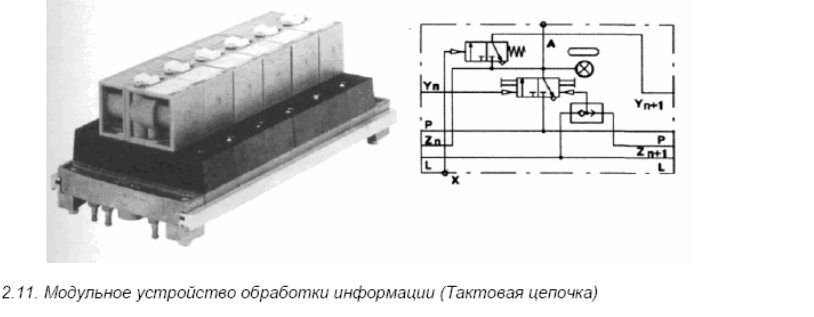
8.. Általános információ a hidrodinamikus áttételekről
Hidraulikus sebességváltó? ez egy olyan eszköz, amely a mechanikai energiát a folyadék áramlásán keresztül továbbítja. A hidraulikus sebességváltó szerkezete egy szivattyút, egy hidraulikus motort és egy munkafolyadékkal összekötő csővezetékeket tartalmaz. A dinamikus hidraulikus gépeket használó hidraulikus hajtóműveket hidrodinamikusnak nevezik.
A hidrodinamikus hajtóművekben lapátos szivattyúkat és hidraulikus motorként lapátos turbinákat használnak. Valódi kivitelben a lapátos szivattyú és a hidraulikus turbina rendkívül közel van egymáshoz, és koaxiálisan egy közös házban helyezkednek el. Mivel ennek a két hidraulikus gépnek közös háza van, a jövőben a szivattyút szivattyúkeréknek és turbinának fogjuk hívni? turbinakerék. Ebben a kialakításban nincsenek csővezetékek, így a szivattyúkerékről a folyadék azonnal a turbinakerék lapátjaiba kerül, de a turbinából? ismét a járókerék lapátjaira.
A gépészetben használt hidrodinamikus hajtóműveket hidraulikus tengelykapcsolókra (fluid kuplungok) és hidraulikus transzformátorokra (nyomatékváltókra) osztják.
A szivattyú- és turbinakerekekből álló folyadéktengelykapcsolók a nyomaték megváltoztatása nélkül való energiaátvitelre szolgálnak, azaz a folyadéktengelykapcsoló bemeneti és kimeneti tengelyén a nyomatékok közel azonosak.
A nyomatékváltók a szivattyú- és turbinakerekeken kívül legalább egy további kerékkel rendelkeznek. A legtöbb üzemmódban mozdulatlan, pl. inaktív (reaktív), ezért általában reaktornak nevezik. A reaktor beépítése a nyomatékváltóba lehetővé teszi az átvitt nyomaték megváltoztatását (átalakítását). Így a nyomatékváltó bemeneti és kimeneti tengelyén a nyomatékok a legtöbb üzemmódban eltérőek.
Nyomatékátalakítónak nevezzük az összetett nyomatékváltót, amely a sebességváltók széles tartományában úgy működik, mint egy nyomatékváltó, magas áttételi arányoknál pedig folyadékcsatolási üzemmódba kapcsol és folyadéktengelykapcsolóként működik. Ez lehetővé teszi a hatékonyság jelentős növelését.
3. előadás
Meghajtók ipari robotokhoz.
1. PR meghajtók összehasonlító jellemzői
2. Pneumatikus hajtás:
- a pneumatikus hajtás elemei;
– tipikus rendszer és ellenőrzések;
– pneumatikus csillapítás:
külső eszközök,
munkatest;
– A pneumatikus hajtómű elhelyezése;
– Pneumatikus szervohajtás.
3. Hidraulikus hajtás:
- terjedelem, előnyei és hátrányai;
– Hidraulikus motor diagram: elemek és paraméterek
4. Elektromos hajtás.
5. Kombinált hajtás:
– elektrohidraulikus;
- hidropneumatikus és pneumohidraulikus.
PR meghajtók összehasonlító jellemzői.
A PR meghajtók közé tartozik egy motor, egy vezérlőrendszer, sebességváltó mechanizmusok, fékberendezések, visszacsatoló érzékelők és kommunikáció. Kommunikációra van szükség az aktuátorok teljesítményének átviteléhez és a vezérlőjelek továbbításához, valamint a visszacsatoláshoz.
A meghajtó típusának megválasztása a PR funkcionális céljától függ. A hajtás típusának megválasztását meghatározó főbb tényezők: a rendeltetés és az üzemi feltételek, a szerkezet teherbírása és a szükséges dinamikai jellemzők, valamint a vezérlőrendszer típusa.
A meghajtó bármilyen ajándék Általános követelmények:
– minimális teljes méretek nagy energiahatékonysággal, amelyek a kimenő teljesítmény és a tömeg arányának nagy értékét biztosítják;
– az automatikus vezérlési és szabályozási módban való munkavégzés képessége, amely optimális gyorsulási és lassítási törvényeket biztosít minimális tranziens folyamatokkal;
– teljesítmény, i.e. a hajtóművek mozgásának végrehajtása nagy sebességgel és kis pozicionálási hibával;
- a meghajtóelemek kis tömege a teljes szerkezet nagy hatékonyságával;
– a szerkezeti elemek megbízhatósága és tartóssága;
- egyszerű telepítés, javítás, karbantartás, utánállítás és csendes működés.
A felhasznált energia típusától függően a hajtások hidraulikus, pneumatikus, elektromos és kombinált (például elektrohidraulikus, hidropneumatikus stb.)
Pneumatikus aktuátorokat a tömeggyártású PR 20...30%-ában (más becslések szerint 40-50%-ban) használnak. Könnyű és közepes (20 kg-ig terjedő teherbírású) PR-hoz használják, 2 ... 3 szabadsági fokszámmal. Ezekben a meghajtókban a pozicionálási hiba nem haladja meg a ± 0,1 mm-t. A hajtás hajtott láncszemének sebessége lineáris mozgással legfeljebb 1000 mm / s, szögben - 60 ford./percig. Egyszerű kialakításúak, alacsony költséggel és meglehetősen megbízhatóan működnek.
Alacsony állíthatóságuk miatt kevéssé használatosak helyzet- és kontúr üzemmódban, ciklikus vezérléssel rendelkeznek, mint pl. a legegyszerűbb lehetőség pozíciós (két pont van beállítva - a mozgás eleje és vége).
hidraulikus A meghajtókat a tömeggyártású közepes és nehéz PR 30%-ában használják 3 ... 4 szabadságfokkal. Ezeknél a hajtásoknál a pozicionálási hiba legfeljebb 0,8…1200 mm/s lineáris mozgási sebességnél nem haladja meg a ± 0,5 mm-t. Ezek a meghajtók összetett felépítésűek, magas gyártási és üzemeltetési költséggel rendelkeznek. A hidraulikus hajtás jó állítási képességgel rendelkezik, PR-ban pozicionális és kontúrműködtetéssel használják.
Elektromos A tömeggyártású PR 40…50%-ában hajtásokat használnak, átlagos terhelhetőség és szabadságfok száma 3…6. Az elektromos hajtás pozicionálási pontossága eléri a ± 0,05 mm-es értéket. Mind pozicionális, mind kontúr üzemmódban használatosak.
Az elektromos hajtások előnyei a nagyobb gazdaságosság, hatékonyság, könnyű összeszerelés és jó vezérlési tulajdonságok.
Az elektromos hajtásokban általában szinkron, léptető és motorokat használnak. egyenáram. Az aszinkron motorokat ritkábban használják a fordulatszám-szabályozás bonyolultsága miatt.
Kombinált meghajtók lehetővé teszi az egyes típusú meghajtók előnyeinek maximalizálását. Az ipari robotok leggyakrabban pneumatikus és hidraulikus (pneumohidraulikus és hidropneumatikus), valamint elektromos és hidraulikus (elektrohidraulikus) hajtások kombinációját használják. A PR-konstrukciókban a pneumohidraulikus hajtások használata korlátozott. bennük mint végrehajtó szerv pneumatikus hengert használnak, sebességének stabilizálását és hidraulikus rögzítését hidraulikus rendszer végzi.
A hidropneumatikus hajtásban hidraulikus motorokat használnak működtetőként, a pneumatikus rendszert pedig a szükséges nyomás létrehozására a hidraulikus rendszerben, ami lehetővé teszi a hidraulikus szivattyúállomások elhagyását.
Pneumatikus hajtás
A pneumatikus hajtás elemei
A pneumatikus aktuátort főként ciklikus vezérlésű PR-ben használják. Funkcionálisan egy ilyen pneumatikus működtető a következő egységekre osztható:
- munkaközeg (levegő) előkészítő egység;
– sűrített levegő elosztó egység;
- végrehajtó motorok blokkja;
– sűrített levegős átviteli rendszer a hajtóművek között.
Levegő előkészítő egység pneumatikus hajtású PR esetén kötelező. A levegőt megszárítják és megtisztítják a portól.
Sűrített levegő elosztó egység olyan eszközöket tartalmaz, amelyek segítségével adott program szerint nyitható vagy zárható a sűrített levegő hozzáférése a végrehajtó motorok munkaüregeihez. Az eszközöket elosztóként használják, ahol zárszerkezetek orsóként és szelepként szolgálnak. Általában a pneumatikus elosztókat elektromágnesek és vezérlőeszközök vezérlésével használják. Azonban mikor bizonyos feltételek(robbanásveszélyes légkör, sugárzás) pneumatikus vezérlésű szelepeket alkalmaznak.
A végrehajtó motorok blokkjaként Lineáris vagy forgódugattyús mozgású, egyszeres vagy kettős működésű hengereket használnak. Minden mobilitási fokozat saját működtetővel (pneumatikus hengerrel) van ellátva, amelynek kialakítása biztosítja a megadott elmozdulásokat, sebességeket és erőket.
A PR megfogóeszköznek lehet egy motorja is, amely biztosítja a manipuláció tárgyának rögzítését, mozgás közbeni megtartását és egy adott ponton történő felszerelés utáni elengedését.
A munkaciklust az egyes motorok meghatározott sorrendben hajtják végre a technológiai folyamat követelményeinek megfelelően, és az SPU részét képező robotvezérlő eszköz által végrehajtott program szerint hajtják végre.
A hajtóberendezések közötti sűrített levegős átviteli rendszerekben különböző szakaszok pneumatikus vezetékeit használják, a meghatározott működési feltételek alapján számítva.
Tipikus séma és vezérlések.
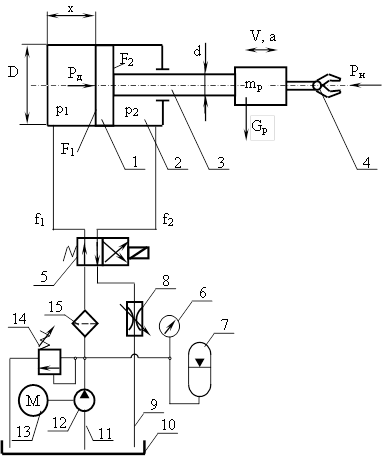
Tekintsük a PR egy szabadságfokú pneumatikus hajtás tipikus sémáját (10. ábra). Ez egy 12 bemeneti szerelvényből áll, amelyen keresztül 0,5 ... 0,6 MPa nyomású sűrített levegőt juttatnak a gyári pneumatikus hálózatból a PR-be. A 11-es szelep üzembe helyezi a hajtást. A 10 nedvességleválasztó a sűrített levegő előkészítésére és a vízkondenzátum eltávolítására szolgál, amely korróziót okoz és növeli a súrlódó részek súrlódását. Továbbá a 9 nyomáscsökkentő szelep megfelelő beállításával előzetesen beállítjuk a hajtóelemekhez szállított sűrített levegő nyomását. Ez a nyomás névleges és a szerint van beállítva technikai követelmények ehhez a PR-hez. A 8 olajporlasztó a levegő előkészítésében is részt vesz, és biztosítja a végrehajtó motor (2. henger) és a 6 elosztó mozgó elemeinek kenéséhez szükséges olaj porlasztását. Ez utóbbiakat ún. orsók és szelepek. Általában az elosztót elektromágnes vezérli. Az elosztók a munkaközeg, jelen esetben a sűrített levegő áramlásának újraelosztását szolgálják a szabályozási programnak és a technológiai folyamat követelményeinek megfelelően.
Rizs. 10 - A pneumatikus működtető szerkezet tipikus diagramja
A 10. ábrán látható séma szerint az 1 dugattyú a 3 rúddal, a 4 karral és az 5 tengelykapcsolóval együtt az S lépésre jobbra mozog. A 7 fojtószelep a motor mozgó alkatrészeinek mozgási sebességének beállítására szolgál. .
A levegőmotort jellemző fő paraméterek a következők: a dugattyú effektív területe a működésben (dugattyú) F 1 és kipufogó F 2 (rúd)üregek; dugattyúlöket S; aktuális koordináta x; sebesség vés a gyorsulás A dugattyú súly m p végrehajtó eszköz (például PR kezek); légnyomás a munkahelyen 1. oés kipufogó panelek 2. o; a csővezetékek hatékony keresztmetszete a bemenetnél f 1 és kilép f 2 ; dugattyú átmérők Dés szár d; hajtóerő R Dés terhelési erő (szükséges) R N.
A pneumatikus henger paramétereinek kiválasztása a következőképpen történik. Vízszintes dugattyú átmérő:
függőleges hengerhez:
ahol p c - légnyomás a hálózatban (0,5 ... 0,6 MPa);
G a működtető súlya, N;
k 1 - együttható, figyelembe véve az R N / R D arányt, a sebességtől függően vés nyomás r s(átlagosan k 1 = 0,4 ... 0,5);
k 2 - együttható, figyelembe véve a súrlódást a hengerben, a Р Н függvényében választva.. Р Н = 0,6 ... 60 kN, k 2 = 0,5 ... 0,05;
B - állandó, B = 11,3;
G a működtető szerkezet mozgó alkatrészeinek súlya a manipuláció tárgyával. "+" jel a dugattyú leengedésekor, "-" jel - emeléskor.
A henger hosszát a dugattyúlökettől függően választjuk meg, kettős működésű hengereknél S=(8…10)D javasolt. A nagy dugattyúlöketeknél a rúd stabilitásának számít. A PR-ben D=32…80 mm és S lökettel 1000 mm-ig pneumatikus hengereket használnak.
A РН terhelési erőt a következő képlet határozza meg:
P N = P T + P I ± G (5)
ahol P T a súrlódási erő;
R I - tehetetlenségi erő, R I \u003d m p d 2 x / dt 2
A pneumatikus henger működési ideje az előrehaladási löketidő összege tPX, tartózkodási idő tBAN BENés a visszatérési idő tÓ. Az előrefutási idő az idő összege t 1 az elosztó működtetése, a levegő elosztása a hengerhez és a nyomásemelkedési idő 1. o, idő t 1 dugattyú mozgása az út mentén Sés az idő t 3 amely során a nyomás 1. o az üzemi nyomásra emelkedik a hálózatban r s.
Állásidő tBAN BEN a folyamat természetétől függ. A dugattyú visszatérési löketideje hasonló periódusokból áll, fordított t1 , t 2 És t 3 . A teljes működési idő határozza meg a PR sebességét minden mobilitási fokhoz.
Levegőfogyasztás (sűrítetlen) a gyakorlati számításokhoz, figyelembe véve az áramlás turbulenciáját egy politropikus folyamathoz pV n = const(n a politropikus index, levegő esetén n=1,4) a következő képlettel határozható meg:
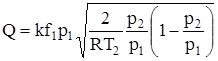 (6)
(6)
ahol μ az áramlási együttható, amelyet a tényleges kiáramlási sebesség és az elméleti sebesség aránya határoz meg (referenciaként, a helyi szűkítések szabványos formájától függően);
p 1 és p 2 - a levegő nyomása az ürítő- és ürítőüregekben;
R – gázállandó (levegő esetén R=287,14 J/kg K);
T 2 - hőmérséklet az ürítőüregben;
f 1 a bemeneti szakasz területe.
A p 2 /p 1 arány kritikus értéke, amelyet a kimeneti kapcsolat sebességének növelésére kívánunk elérni, 0,529. Ezt az értéket a kilépő levegő nyomásának csökkentésével érik el, miközben a teljes légáram gyakorlatilag változatlan marad.
A pneumatikus működtető csillapítása
A légmotor dugattyújának nagy fordulatszáma miatt az előre- és hátramenet végén le kell fékezni. Ez javítja a pozicionálási pontosságot és csökkenti a dinamikus terheléseket a PR-ban.
A PR pneumatikus hajtásokban kétféle fékezést alkalmaznak: csillapítóberendezések segítségével vagy fojtásos fékezéssel (10. ábra).
Csillapító berendezések használatakor (külső eszközök) a fékezés kis területen a löket végén a pozicionálási ponthoz közeledve történik. Fojtatók használatakor (a munkatest fékezése) a gyorsítást és lassítást a löket nagyobb részében hajtják végre, mint amennyit a kinematikai paraméterek változásának törvénye a teljes mozgási ciklus alatt elért.
csillapító fékezés a mozgási energia csillapításán alapul. A legszélesebb körben használt hidraulikus lengéscsillapítók (11. ábra)és kisebb - mechanikus .
A hidraulikus lengéscsillapító a következőképpen működik. A fékezés pillanatában az 1 ütköző, amely kölcsönhatásba lép a levegőmotor rúdjával, elfojtja a lengéscsillapító mozgó részét - a 3 hidraulikus henger 2 dugattyúját. Az olajnak a 4 kúpos nyíláson keresztül az 5 üregbe való elmozdulása miatt a 2 dugattyú Fékezett A sima fékezést a lengéscsillapító paraméterek megválasztása biztosítja: a kúpos nyílás mérete 4, fojtószelep paraméterek 8 és akkumulátorrugók 7 6. Méretek dd, bÉsl a dugattyú ismert fordulatszámából és a megengedett féklöketből számítva.
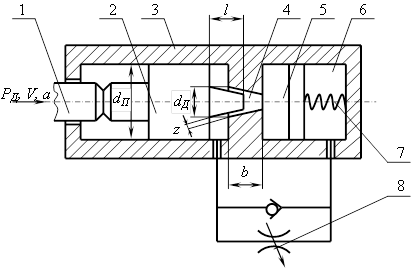
Rizs. 11 - A hidraulikus lengéscsillapító vázlata.
Az R D csillapítóerő a következő képlettel határozható meg:
 (7)
(7)
ahol Δр з a nyomásesés a z gyűrű alakú résben;
d p a lengéscsillapító dugattyú átmérője.
A Δr s nyomásesést a következő képlet határozza meg:
 (8)
(8)
ahol μ a folyadék dinamikus viszkozitása;
b a csillapítási rés hossza;
v W a folyadék sebessége a résben.
A folyadékáramlás folytonosságának feltételéből a következőket kapjuk:
ahol v a végrehajtó motor dugattyújának fordulatszáma;
f G a rés területe.
Aztán végre megkapjuk:
 (10)
(10)
A mechanikus lengéscsillapítókban a hajtás mozgó elemeinek és a terhelés energiája egy összenyomott rugó energiájává alakul. A mechanikus lengéscsillapító kialakítása egy házba zárt hengeres rugó formájában készült. A rugós lengéscsillapítókat legfeljebb 1 kg teherbírású hajtásokhoz használják, mivel a rugó paraméterei a mozgatandó tárgyak tömegétől, valamint a sebességtől függenek.
A rugó fő paramétere a rugóerő P pr \u003d P D.
Tdugattyús fékezés munkafolyadék használatávalúgy érhető el, hogy csökkenti a légáramlást az ürítőüregből egy speciális fojtószelep beszerelésével (7. poz., 10. ábra), és lehetővé teszi a kimeneti szakasz területének megváltoztatását f 2 törvényben f 2 = f(x) . Ilyenkor a nyomásérték változik, és kialakul a dugattyúmozgás szükséges törvénye, azaz. sebességét szabályozzák. Ez a fékezési mód csak a levegő nagy összenyomhatósága miatt lehetséges, és legfeljebb 5 kg teherbírású robotoknál alkalmazzák.
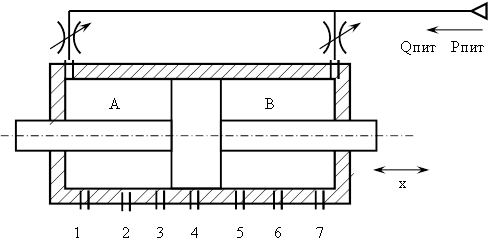
A fékezés másik módja az a módszer, amelyben a motor megfelelő üregében ellennyomás létrehozására szolgáló áramkört használnak. Amikor a dugattyú elér egy bizonyos pozíciót, a fővezeték nyomása az ürítőüregbe kerül (12. ábra).
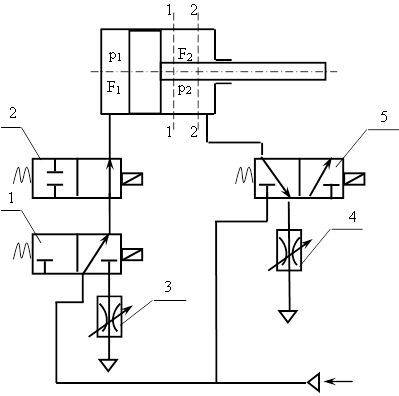
Rizs. 12 - Az ellennyomásos fékezés séma
A munka a következő. A sűrített levegő a tápvezetékből az 1. és 2. pneumatikus elosztókon keresztül a henger bal üregébe jut. A jobb oldali üreg az 5 pneumatikus elosztón és a 4 fojtószelepen keresztül kapcsolódik a légkörhöz. A dugattyú balról jobbra mozog, miközben a dugattyú nyomásesése Δр=р 1 -р 2 . Amikor a dugattyú eléri az 1-1 pozíciót, a PR vezérlőrendszer segítségével az 5 pneumatikus elosztó másik helyzetbe kapcsol (balra), és a tápvezetékből a sűrített levegő a pneumatikus henger jobb üregébe kerül. A nyomás mindkét üregben kezd kiegyenlítődni p 1 =p 2 értékre. Az F 1 és F 2 dugattyú bal és jobb oldali részének területének különbsége miatt P \u003d p 1 (F 1 - F 2) erő hat a dugattyúra, amelynek hatására a dugattyú elmozdul. kisebb sebességgel.
A dugattyúra ható erőkiegyenlítés érdekében a 2 pneumatikus elosztónak az 5 pneumatikus elosztóval egyidejűleg kell kapcsolnia, és meg kell akadályoznia a sűrített levegő bejutását a henger bal üregébe, ami egy zárt V térfogatú lesz, amelyre figyelembe vehetjük. pV= const.
Egyensúly esetén a dugattyún:
![]() (11)
(11)
ahol N külső erők (funkcionális cél).
A területet átmérőkkel kifejezve olyan feltételt kapunk, amely a nyomásviszonyon keresztül jellemzi a henger üregeinek egyensúlyát:
(ha N ext = 0) (12)
ahol D és d a dugattyú és a rúd átmérője.
Ellenkező esetben az utolsó képlet a következőképpen írható át:
 (13)
(13)
ahol X 1Н és X 1 a dugattyú kezdeti és végső koordinátái.
Ez a képlet a következő kifejezésből kapott, figyelembe véve pV= const:
 (14)
(14)
V 1Н és V 1 a bal üreg kezdeti és végső térfogata.
Valós tervekben d/D= 0,3...0,7. Ebben az esetben X 1 \u003d (1,1 ... 2) X 1H. Ekkor nyilvánvaló, hogy a leállás jelzése után (az 5. pneumatikus elosztótól balra történő kapcsolás után) a dugattyú elmozdulása az X 1H kiindulási helyzet 10-100%-a lehet.
A fenti függőségek nem tükrözik teljes mértékben a tényleges működési feltételeket, mert ne vegyék figyelembe a tehetetlenségi erőket stb., és minőségi képet mutassanak a dugattyú ellennyomással történő fékezésekor lezajló folyamatokról (a tehetetlenségi erők figyelembevétele minden tervezésnél, szilárdsági és egyéb számításnál fontos és kötelező!).
A dolgozó test általi fékezési módszer nem az egyetlen. Sok más séma létezik, de közös hátrányuk a csillapítás újrakonfigurálása, amikor a feltételek és a külső terhelés jellege megváltozik.
Ezt a csillapítási módszert legfeljebb 1 kg teherbírású robotoknál alkalmazzák.
A pneumatikus hajtómű elhelyezése
A kimeneti kapcsolat (például US) pozicionálása a ciklikus vezérlésű PR-ban két szélső ponton történik, és ±x max ; ±φ max - maximális és minimális dugattyúlöket lineáris és szögeltolódáshoz.
Bizonyos esetekben szükség van a kimeneti kapcsolat elhelyezésére a közbenső pontokon. Ebben az esetben a pozicionálás külső mechanikus ütközők segítségével történik csillapítással az egyes ütközők (pontok) megközelítésekor. A számítások és a gyakorlat azt mutatja, hogy a pneumatikus működtetőkben az ilyen pozicionálási pontok 6 ... 9 és nem többek lehetnek, a munkafolyadék (levegő) nagy összenyomhatósága és a mozgás sebessége miatt.
A pozicionálási pontok száma növelhető az ún. pozícionálók.
A legtöbb egyszerű áramkör helymeghatározást mutatjuk be rizs. 13.
Rizs. 13 - Pozícionálási séma
A pneumatikus motor henger formájában készül, kettős működésű hamis rúddal. Mindkét üreget egyidejűleg táplálják. Ha a nyomás az üregekben egyenlő, a dugattyú nyugalomban van. Az 1–7. sorok levegőt juttatnak a légkörbe. Ha az egyik kimenetet a vezérlőrendszer parancsára kinyitják, a nyomás a megfelelő üregben csökken. Az erőkülönbség hatására a dugattyú addig mozog, amíg a kimenet el nem záródik, és a nyomás az A és B üregekben kiegyenlítődik. A kimenet zárása és nyitása történhet mechanikusan vagy pneumatikus elosztóval. Mechanikusan a kimenetet maga a dugattyú zárja le.
A kimeneti link elhelyezésének ezt a módját használják leggyakrabban.
Egy másik pozicionálási módszer a mechanikus fék használata, amely a kimeneti kapcsolat leállítására szolgál. A fékezés két szakaszban történik, az elsőben - a kimeneti kapcsolat sebessége a maximum 5-10% -ával csökken. Itt helyzetérzékelők segítségével meghatározzák a fékezési pontokat, amelyeknél a kimeneti link további mozgása lassulni kezd. A második fokozatban a kimeneti lánc egy adott ponton egy fék segítségével megáll.
A PR pneumatikus hajtóművek helyzetszabályozása 0,1 és 20 kg közötti teherbírások széles tartományához használható. és sebessége 500-1000 mm/s.
Pneumatikus szervo hajtás
A szervo pneumatikus hajtás alkalmazása lehetővé tenné a PR kontúrvezérlésének használatának problémáját. Ennek eredményeként a PR kimeneti kapcsolat precíz, valamint közbenső pozicionálásának problémája is megoldódna. A PR pneumatikus berendezésekben azonban a szervohajtás alkalmazása a gyakorlatban ritkán kerül alkalmazásra, ami számos körülménynek köszönhető, elsősorban a munkaközeg (levegő) tulajdonságainak köszönhetően.
kördiagramm szervo pneumatikus hajtás bemutatásra kerül rizs. 14-a.
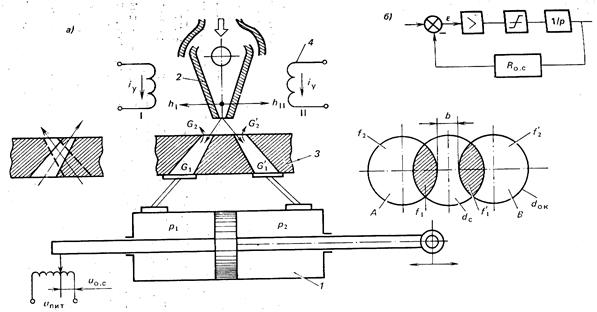
14. ábra - A szervo pneumatikus működtető vázlata:
1 - henger; 2 – sugárhajtómű; 3 – vevőfúvókák; 4 - vezérlő tekercselés.
A sűrítettlevegő-elosztó a 2 sugármechanizmus, jobbra és balra eltérítve a 3 vevő fúvókáin keresztül arányosan változik az 1 henger bal vagy jobb üregébe áramló levegő. armatúra (EPM) a sugárpisztoly tengelyén található (az ábrán nem látható). Az i y vezérlőáramok hígításakor a vezérlő tekercsekben az armatúrára ható erőegyensúly jön létre, amely a sugárral együtt középső helyzetben van. Ha az i y vezérlőáramokban eltérés van, az erőegyensúly megbomlik, az armatúra és a sugár az áramok különbségével arányos a szöget átfordul. A hengerrúd helyzetérzékelője egy visszacsatoló potenciométer.
A képen rizs. 14-b bemutatásra kerül a zárt hurkú vezérlést végző hajtás blokkvázlata. Az U összehasonlító elem összehasonlítja a vezérlőjelet a visszacsatoló jellel, és egy ε hibajelet generál, amely a vezérlőhöz kerül, amely egy erősítőből és egy telítési zónával rendelkező nemlineáris elemből áll. fés integrátor 1/r.
f– korlátozza a jel nagyságát, 1/r– növeli a működés pontosságát.
A követő pneumatikus működtetők fojtószelep-szabályozó rendszerek, mert. a hajtás áramlási sebességének megváltoztatása a levegőt szivattyúzó kompresszor teljesítményének megváltoztatásával a levegő összenyomhatósága miatt kilátástalan.
A sugárelosztó működési elve a kettős energiaátalakításon alapul. Először a sugárcsőben a sűrített levegő potenciális energiája alakul át a légsugár áramlásának kinetikai energiájává, majd a vevő fúvókáiban a sugáráramlás kinetikus energiája alakul át a sugáráramlás potenciális energiájává. sűrített levegő belép a henger munkaüregeibe. A nyomásveszteség ebben az esetben akár 10%.
Hidraulikus hajtás
Hatály, előnyei és hátrányai
Fentebb megjegyeztük, hogy a PR meghajtására szolgáló hidraulikus motorok terjedelme meglehetősen magas, és 30%-ban tömeggyártású közepes és nehéz PR-ból áll. Ezekben a meghajtókban a pozicionálási hiba meglehetősen kicsi, és legfeljebb 0,8 ... 1200 mm / s lineáris mozgási sebességnél nem haladja meg a ± 0,5 mm-t. A PR hidraulikus motorjait általában hordozható szabadsági fokokhoz használják.
A hidraulikus hajtások ilyen széles körű alkalmazása a PR-konstrukciókban elsősorban azok előnyeinek köszönhető, mint például:
– magas energiaintenzitás;
- sebesség;
- alacsony tehetetlenség;
- alacsony összenyomhatóság munkafolyadékés ennek köszönhetően a statikus terhelési jellemzők kellően nagy merevsége;
- jó lehetőség a hajtóművek automatikus szabályozásának és sebességszabályozásának megvalósítására;
– a munka és a működés megbízhatósága.
Hátrányok: Ezek az aktuátorok összetett felépítésűek, magas gyártási és üzemeltetési költséggel rendelkeznek, valamint szivárgási lehetőséggel és a munkaközeg hűtésének szükségességével rendelkeznek.
A PR hidraulikus hajtásokban a következő fő típusú hidraulikus motorokat használják, amelyek néha kombinálhatók különféle mechanikus hajtóművekkel:
- lineáris hidraulikus hengerek a rúd transzlációs mozgásával;
– korlátozott forgásszögű forgó hidraulikus motorok;
- hidraulikus motorok.
A hidraulikus és pneumatikus hajtóművek minden eleme szabványosított és a referencia irodalomban szerepel.
A pneumatikus motorokkal ellentétben a hidraulikus motorokhoz tápegységet biztosítanak, amely a PR része. Tartalmaz egy hidraulikus szivattyút, fojtószelepeket, szűrőket, nyomásszabályozókat és egyéb eszközöket. (15. ábra).
Hidraulikus motor diagram: elemek és paraméterek
Rizs. 15 - Hidraulikus motor diagram
A PR hidraulikus motor tartalmaz egy dugattyút 1, egy kettős működésű hengert 2, egy kézi rudat 3 és egy megfogó szerkezetet 4. Az olaj beszállítása és leeresztése egy hidraulikus orsóval 5 történik. A hidraulikus motor tartalmaz még egy 6 nyomásmérőt, egy 7 akkumulátor, 8 fojtószelep (a kimeneti link mozgási sebessége - a PR kéz szabályozott), 9 leeresztő cső és 10 tartály, valamint 11 szívócső, 12 hidraulika szivattyú, 13 villanymotor, biztonsági szelep 14 és szűrő 15.
A hidraulikus motor fő paraméterei a következők: effektív dugattyúfelület a munka során F 1 és lecsepegtetjük F 2 üregek; stroke S; aktuális koordináta x; sebesség Vés a dugattyúgyorsulás A; súly m p PR kezek; olajnyomás a működésben 1. oés lecsepegtetjük 2. oüregek; a csővezetékek hatékony keresztmetszeti területei a munkában f 1 és lecsepegtetjük f 2 autópályák; dugattyú átmérők Dés szár d; hajtóerő R Dés terhelési erő R N.
A terhelési erőt a levegőmotorhoz hasonlóan a következő képlet határozza meg:
![]() (15)
(15)
ahol P t a teljes súrlódási erő a vezetékekben;
P és - a tehetetlenségi erő, P és \u003d m p d 2 x / dt 2
G az összes mozgó alkatrész súlya, ha a henger függőleges. "+" jel a dugattyú leengedésekor, "-" jel - emeléskor.
A hajtóerő az ellenállási erő és a terhelő erő összege:
![]() (16)
(16)
ahol P c az olajellenállási erő a leeresztő vezetékben, az olajnyomás és a dugattyú területének szorzata határozza meg a hidraulikus henger leeresztő üregében: .
A hidraulikus motor fő paramétereinek kiválasztása, amelyek alapján a PR márkája és modellje véglegesen kiválasztható, a következőképpen történik.
Amikor a dugattyú jobbra mozdul.
Ebben az esetben a PR henger méretei empirikus összefüggésben állnak egymással:
A D és d méreteket mm-ben, ill F 1 És F 2 cm2-ben kapjuk meg.
A mozgó erőt a következő képlet határozza meg:
ahol k t a súrlódási veszteségeket figyelembe vevő együttható, k t = 09…0,98.
R d newtonban, p - megapascalban van helyettesítve.
Az olajfogyasztás és a dugattyú fordulatszáma függőségekkel függ össze:
![]() (19)
(19)
![]()
ahol Q az áramlási sebesség, l/perc;
V – sebesség, m/min.
Amikor a dugattyú balra mozdul:
![]() ; (21)
; (21)
![]() . (22)
. (22)
A V 1 és V 2 fordulatszámok adott arányához (amikor V 1< V 2 и количество поступающего в цилиндр масла const) a rúd átmérőjét a következő kifejezésből találjuk meg:
![]() (23)
(23)
ahol D és d mm-ben, V 1 és V 2 pedig m/percben értendő.
Dugattyú átmérője Dés a hossza L válasszon a PR csomópont elrendezési feltételeinek feltételei közül. Általában L/D = 18…20 javasolt, nagy elmozdulások esetén pedig L/D>>18…20.
A forgólapátos motor paraméterei az alábbi összefüggések alapján kerülnek kiválasztásra.
Meghajtó nyomaték (Nm-ben) a kimenő tengelyen:
 (24)
(24)
ahol p 1 és p 2 - nyomás a nyomás- és lefolyóüregekben, MPa;
b – pengeszélesség, mm;
D és d a hidraulikus motor méretei.
A kimenő tengely forgási szögsebessége (rad/s):
![]() (25)
(25)
ahol Q az olajfogyasztás, l/min.
A hidraulikus motor paraméterei az alábbi összefüggések alapján kerülnek kiválasztásra.
Meghajtó nyomaték a kimenő tengelyen:
![]() (26)
(26)
ahol q a hidraulikus motor üzemi térfogata, cm 3;
p 1 és p 2 - nyomás a nyomó- és lefolyóvezetékekben, MPa.
A kimenő tengely fordulatszámát (min -1) a következő képlet határozza meg:
![]() (27)
(27)
ahol Q az olajfogyasztás, l/min.
Elektromos hajtás.
Jellemzők, előnyök és hátrányok
BAN BEN Utóbbi időben a PR-alkalmazás világában és hazai gyakorlatában egyre elterjedtebb az elektromos hajtás. Nem csak robbanásveszélyes környezetben való munkavégzésre és hidraulikus rendszerrel felszerelt gépekkel való munkavégzésre tervezett robotokban használják az egységesítés érdekében.
Az új PR sorozat elektromos hajtásai nagy nyomatékú egyenáramú motorral, kefe nélküli egyenáramú motorral, léptetőmotorral és ritkábban aszinkron motorral rendelkeznek.
A PR elektromos hajtások jellemzői a kis nyomatékok kiterjesztett tartománya (összesen 0,05 Nm-ig), a megnövelt maximális fordulatszám (akár 15 × 10 3 ford./perc), a csökkentett motortehetetlenség, az elektromágneses fékek és különféle érzékelők beágyazásának lehetősége. , valamint mechanikus és hullámátvitel.
Az elektromos hajtások PR-ben való használatának fő előnyei a következők:
– a motorok kompakt kialakítása;
- Magassebesség;
– a forgás egyenletessége;
- nagy nyomaték csúcssebesség;
– nagyfokú megbízhatóság;
– a sebesség és a pozicionálás széles skálája, valamint a terhelési nyomatékok változása;
– a hosszú távú működés lehetősége fékezett üzemmódban;
- nagy pontosságú működés, amit a digitális használata biztosít mérőrendszerés nagy pontosságú impulzusérzékelők;
– a motorok felcserélhetősége;
– különféle konverterek kompakt kialakítása;
– alacsony zaj- és rezgésszint, valamint a villamos energia rendelkezésre állása.
Az elektromos hajtások PR-ben való használatának hátrányai a következők:
– korlátozott használat robbanásveszélyes környezetben;
- a kimeneti kapcsolat sebességének függése a külső kapcsolattól, ami további hajtásvezérlő hurkok létrehozásának szükségességéhez vezet;
- egy további kinematikai áramkör jelenléte az elektromos motor és a PR munkateste között.
Az elektromos hajtás működési diagramja
A modern PR elektromos hajtása meghajtók komplexuma, amelyek mindegyike külön-külön szabályozza a mobilitást. Tekintsük a HdS05 / 06 PR-modell (GdA, Németország) elektromos hajtás példáján a leggyakoribb funkcionális diagramot (16. ábra).
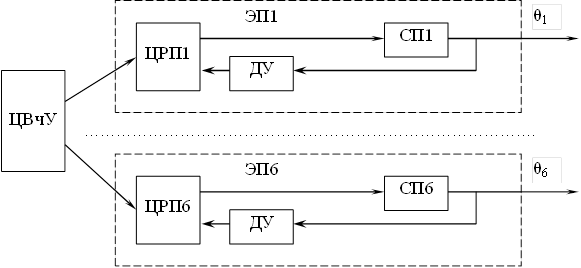
Rizs. 16 - A HdS05/06 elektromechanikus robotmodell vezérlésének működési diagramja.
Ennek a PR-nak hat szabadsági foka van, amelyeket a diagramon θ 1 ... θ 6-ként jelez. Mind a hat elektromos hajtás (EP1…EP6) vezérlése a PR programvezérlő rendszer (SPU) közös központi számítási eszközéről (CHU) történik. A központi számítógép jeleket küld az egyes meghajtók digitális helyzetszabályozóinak (TsRP1….TsRP6). A digitális helyzetszabályozók a szervohajtásokat (SP1…SP6) a TsVChU és a szögérzékelők (DU) jeleinek megfelelően vezérlik, például a fotoelektromos konverziós szögmérőket.
Az elektromos hajtás egyik legösszetettebb és legkritikusabb eleme a szervohajtás (SP).
A PR szervohajtás működési diagramja a következőn látható rizs. 17.

Rizs. 17 - A PR szervohajtás működési diagramja.
Ez a séma egy analóg-digitális automatikus vezérlőrendszer, amely egyesíti a háromhurkos slave vezérlőrendszer elvén működő kombinált analóg rendszer előnyeit a digitális rendszer előnyeivel (nagy pontosság és egyszerű programozás).
Az első áramkört egy motor (M) alkotja konverterrel (PR) és áramszabályozóval (RT). A második áramkör tartalmaz egy sebességérzékelőt (DS) és egy sebességszabályozót (RS). A harmadik áramkör ezenkívül tartalmaz egy szögérzékelőt (DU) és egy digitális helyzetszabályozót (DRP).
Sebesség- és áramszabályozóként a PR-ban, az analógban és újabban a digitális műveleti erősítőket használják leggyakrabban, amelyek segítségével szinte minden szükséges szabályozási törvény könnyen megvalósítható. A sebességérzékelő lehet analóg vagy digitális is.
Bizonyos esetekben nem szükséges sebességérzékelő használata, mert. a fordulatszám-változás jelét a digitális helyzetszabályozóban (DRP) lehet kiszámítani a szögérzékelő (DU) jelének megkülönböztetésével
Így a 16. és 16. ábrán látható funkcionális diagramok elemzése. A 17. ábra azt mutatja, hogy az adott áramkörtől függetlenül a PR elektromos hajtás a következő elemekből áll:
– működtető elem (motor);
- átalakító;
– áram-, sebesség- és szögszabályozók;
– és visszacsatoló érzékelők áram-, sebesség- és szögérzékelők.
A robotika fejlesztésének modern irányzatai olyanok, hogy lehetővé teszik olyan szervohajtások gyártását, amelyek szerkezetileg egyesítenek egy motort, egy átalakítót, érzékelőket, valamint sebesség- és áramszabályozókat.
[Előző előadás] [Tartalom] VIP felhasználó.Ez teljesen ingyenesen megtehető. Olvas.
Pneumatikus hajtás
fémjel modern termelés Az azonos típusú csúcstechnológiás alkatrészek széles körben elterjedt használata a berendezésekben a funkcionalitás és a kialakítás tekintetében általános ipari felhasználásra. Először is, ezek az alkatrészek különféle típusú meghajtókat és rendszereket tartalmaznak.
A rendszer egymással összefüggő objektumok halmaza, amelyeket egyetlen cél és egy közös működési algoritmus egyesít. Ha az objektumok műszaki eszközök, amelyek kölcsönhatása folyadék vagy levegő segítségével történik, akkor az ilyen rendszereket hidraulikus és pneumatikus, vagy röviden hidraulikus és pneumatikus rendszereknek nevezzük. A bennük használt folyékony és sűrített levegőt munkaközegnek nevezzük. (energiahordozó).
A funkcionális céltól függően a hidraulikus és pneumatikus rendszereket vezérlőrendszerekre osztják - olyan rendszerekre, amelyek különféle gépek vezérlésére szolgálnak, és olyan rendszerekre, amelyek ezekben az objektumokban a munkafolyamatot biztosítják (kenőrendszerek, üzemanyagrendszerek, hűtőrendszerek, hő- és gázellátás stb. ... P.).
A vezérlőrendszereket, amelyek egy sor eszközt tartalmaznak, amelyek a gépekben és mechanizmusokban erők és mozgások létrehozására szolgálnak, hajtásoknak nevezik. A felhasznált energiaforrástól függően elektromos, hidraulikus és pneumatikus hajtásokat különböztetnek meg.
Ennek vagy annak a meghajtónak a hatókörét az mindegyikben rejlő előnyök és hátrányok elemzése határozza meg (1. táblázat).
Tab. 1. A hajtások összehasonlítása a felhasznált energia típusa szerint
| Kritérium | Elektromos hajtások | Hidraulikus hajtások | Pneumatikus működtetők |
| Energia költségek | Alacsony 1 | Magas 3…5 | Magas 7…10 |
| Energiaátvitel | Korlátlan távolsági sebesség 300 km/s-ig | 100 m-es távolságig, sebesség - 6 m/s-ig, jelátvitel - 100 m/s-ig | 1000 m távolságig, sebesség - 40 m / s-ig, jelátvitel - 40 m / s-ig |
| Energia tároló | Nehézség | Korlátozott | Könnyű megcsinálni |
| Lineáris mozgás | Nehéz, drága, kevés erőfeszítés | Egyszerű, nagy erőfeszítés, jó sebességszabályozás | Egyszerű, kis erőfeszítés, a sebesség a terheléstől függ |
| forgó mozgás | Egyszerű, nagy teljesítményű | Egyszerű, nagy nyomaték, alacsony frekvencia | Egyszerű, alacsony nyomaték, magas frekvencia |
| Az aktuátor működési sebessége | Különleges feltételektől függ | Akár 0,5 m/s | 1,5 m/s és nagyobb |
| Erőfeszítések | Nagy erőfeszítés, túlterhelés nem megengedett | Erők 3000 kN-ig, túlterhelés elleni védelem | Erők 30 kN-ig, túlterhelés elleni védelem |
| Pozícionálási pontosság | +1 µm és több | Akár +1 µm | 0,1 mm-ig |
| Merevség | Magas (mechanikus köztes elemeket használnak) | Magas (a hidraulikaolajok gyakorlatilag összenyomhatatlanok) | Alacsony (sűrítjük a levegőt) |
| Szivárog | Nem | Szennyezést teremteni | Nem árt, csak energiapazarlás |
| Környezeti hatás | Érzéketlen a hőmérséklet változásaira | Érzékeny a hőmérséklet változásaira, tűzveszélyes | Gyakorlatilag érzéketlen a hőmérséklet-ingadozásokra, robbanásbiztos |
A pneumatikus működtetőkkel ellátott berendezéseket, amelyekben a munkaközeg a sűrített levegő, a tervezés egyszerűsége, a könnyű karbantartás és kezelés, a nagy sebesség, a megbízhatóság és a működés tartóssága, a funkcionális rugalmasság, az alacsony költség, valamint a munkavégzési képesség jellemzi. agresszív környezetben, robbanásveszélyes -, tűz- és nedvességveszélyes körülmények között. A sűrített levegő könnyen felhalmozódik és szállítható, a tömítéseken keresztüli kiszivárgása, bár nem kívánatos, nem jelent veszélyt a környezetre és a termékekre, ami különösen fontos az élelmiszeripar, az illatszer, az orvostudomány és az elektronikai ipar számára.
A pneumatikus hajtások abban különböznek az elektromos hajtásoktól, hogy képesek a lineáris és forgó mozgásokat átalakító mechanizmusok nélkül reprodukálni, nagyobb teljesítménysűrűséggel, valamint a túlterhelés alatti működőképesség fenntartásával. Ugyanakkor az ipari pneumatikus vezetékek által meghajtott pneumatikus hajtóművek válaszsebessége és maximális kimeneti teljesítménye kisebb.
A hidraulikus hajtásokhoz képest a pneumatikus hajtások előnyei a központosított sűrített levegőforrás használatának lehetősége, a visszatérő vezetékek és a kommunikáció hiánya, az alacsonyabb tömítettségi követelmények, a környezetszennyezés hiánya és a kimeneti kapcsolat nagy sebessége. A pneumatikus hajtóműveket a könnyű vezérlés, a beépítési hely szabad megválasztása és a környezeti hőmérséklet változásaira való alacsony érzékenység jellemzi.
Ugyanakkor a pneumatikus hajtóműveknek van néhány hátránya, amelyek korlátozzák a hatókörüket. Például annak a ténynek köszönhetően, hogy a központi pneumatikus vezetékekben a légnyomás, amely 0,4-1,0 MPa (4-10 bar), jelentősen alacsonyabb, mint a hidraulikus rendszerek nyomásszintje - akár 60 MPa (600 bar), pneumatikus Az aktuátorok lényegesen alacsonyabb energiafogyasztással és rosszabb súly- és méretmutatókkal rendelkeznek. A levegő összenyomhatósága miatt műszakilag nehézzé válik a hajtóművek kimeneti láncszemeinek zökkenőmentes mozgása a terhelés ingadozása során, valamint azok pontos megállítása bármely közbenső helyzetben. (pozicionálás) és az adott mozgásjog végrehajtása.
Annak érdekében, hogy megértsük a pneumatikus rendszerek egyes elemeinek rendeltetését, megértsük működési elveiket és általános szerkezetekké egyesítsük, bevezetünk néhány általános fogalmat.
Ismeretes, hogy minden technikai folyamat a következőkre oszlik:
technológiai — anyagok előállítása és feldolgozása;
energia - előállítás, átalakítás és átvitel különféle fajták energia;
információ - információáramlások kialakítása, fogadása, feldolgozása, tárolása és továbbítása.
Ez alapján elmondhatjuk, hogy a pneumatikus hajtás, mint bármely más, két egymással összefüggő fő részből áll:
teljesítmény, amelyben energiafolyamatok zajlanak;
információs folyamatok kezelése, megvalósítása
A meghajtóelemek funkcionális rendeltetésüktől függően különböző alrendszereihez tartoznak. Például a sűrített levegő előállítására és előkészítésére használt eszközök (például kompresszorok, szűrők, szárítók, vevők stb.) alkotják a hajtás energiaellátó alrendszerét.
A fogadott sűrített levegő energiagazdálkodása, amely a paraméterek, például a nyomás és az áramlás szabályozásából, valamint a sűrített levegő áramlásának elosztásából és irányából áll, nyomásszelepek, fojtószelepek, elosztók és egyéb elemek segítségével történik. a vezető és szabályozó hajtás alrendszer.
A hasznos munkát - különféle munkamozgások elvégzését, vagy erők létrehozását gépekben, szerszámgépekben, technológiai berendezésekben - működtetők végzik. (pneumatikus hengerek, pneumomotorok, markolatok stb.), amelyek a hajtás végrehajtó alrendszerét alkotják.
A legegyszerűbb hajtásoknál a vezérlési funkciók az embernél maradnak
A sematikus pneumatikus diagramok általában függőlegesen készülnek (valamint a blokkdiagramok). Az energiaáramlás (sűrített levegő áramlás) mozgási irányát a hajtás teljesítményrészének diagramjain alulról felfelé vettük.
Az irányítási és ellenőrzési funkciók megvalósítása mindig számos logikai és számítási jellegű művelet elvégzésének szükségességével jár. Mivel az ember élettani képességei, mint vezérlő rendszer korlátozottak, a meglévők hatékony felhasználása és új, nagy teljesítményű üzemek fejlesztése csak a vezérlési funkciók gépekre történő átadásával lehetséges. Az automatikus vezérlés feladata tehát az irányítási folyamat megvalósítása személy közvetlen részvétele nélkül.
Nyitott és zárt automatikus vezérlőrendszerek (ACS) alkalmazása. Nyílt rendszerekben nincs kontroll a vezérelt objektum állapota felett, a vezérlési művelet a vezérlés célja és a vezérelt objektum tulajdonságai alapján alakul ki. Zárt automata vezérlőrendszerekben a vezérlési művelet a vezérlő objektum állapotának - aktuális vagy vezérlési pontokon - összevetésének eredménye alapján történik egy adott (kötelező)).
A zárt vezérlőrendszer vezérlési részébe tartozó eszközök funkcionális rendeltetésük szerint két alrendszerre oszthatók:
információs (érzékszervi));
logikai számítástechnika (processzor).
Az információs alrendszer különféle bemeneti eszközöket tartalmaz a külső vezérlőjelekhez, valamint érzékelőket és jelzőket.
A logikai-számítási alrendszer célja a bemeneti vezérlőjelek meghatározott program szerinti feldolgozása és a hajtás teljesítményrészében lévő energiaszabályozó eszközökre történő kimenete.
Az üzemi feltételektől, a biztonsági követelményektől vagy a hajtás teljesítményrészének bonyolultsági fokától függően a vezérlőrész pneumatikus, elektromos vagy elektronikus automatizálási eszközökkel valósítható meg.
A legtöbb esetben a géphajtások működtetői merev vagy kinematikus kapcsolatban állnak a vezérlőobjektummal, ami lehetővé teszi az objektum megfelelő állapotának megítélését kimeneti kapcsolataik állapota alapján.
Az automatikus vezérlőrendszerekben a jelek továbbítása a következőn keresztül történik zártláncú. Ezzel egyidejűleg megvalósul az ACS felépítésének alapelve, amely visszacsatolás alkalmazásából áll, amely biztosítja a vezérlő objektum állapotának (vagy a működtető szerkezet állapotának) változásáról szóló információk továbbítását a vezérlőrendszer felé. .
Az ilyen séma szerint működő automata vezérlőrendszereket osztályozzák: a vezérlés típusa, az átvitt jelek képződésének jellege és típusa stb. A pneumatikus automata vezérlőrendszerek teljes választéka közül a diszkrét vezérlőrendszerek a legelterjedtebbek, azaz a rendszerek. erőltetett lépésről-lépésre folyamattal. Az ilyen rendszerekben a program csak a vezérelt rendszertől érkező jelekre lép az aktuális lépésről a következőre.
Ha a pneumatikus szelepmozgató vezérlési része nem pneumatikus elem alapon van megvalósítva, akkor hibrid automatikus vezérlőrendszerről beszélünk. Tehát, ha a vezérlőrendszer elektromos reléérintkezős eszközök alapján készül, vagy a vezérlési funkciókat ipari vezérlő végzi, akkor elektro-pneumatikus vezérlőrendszerről beszélünk.
Mert elektronikus rendszerek a vezérlések a sebesség, a méretek és az átprogramozás egyszerűsége szempontjából kedvezőbbek a pneumatikusakhoz képest, és általában kényelmesebb az elektronikus érzékelők segítségével történő információgyűjtés, majd az elektro-pneumatikus automata vezérlőrendszereket egyre gyakrabban alkalmazzák a különféle technológiai automatizálásra. folyamatokat.
2. Pneumatikus rendszerek működésének fizikai alapjai
A pneumatikus automatizálás minden elemében, készülékében és rendszerében a munkaközeg leggyakrabban a kompresszorban elősűrített levegő (egyes speciális esetekben más gázokat is használnak), ami körülvesz bennünket a mindennapi életben. A levegő egy gázkeverék, amely főként két gázból áll: nitrogén N2 (78,08%) és oxigén O2 (20,95%). Kis mennyiségben inert gázokat - argon Ar, neon Ne, hélium He, kripton Kr és xenon Xe - és hidrogén H2-t (0,94%), valamint szén-dioxidot (szén-dioxid) CO2-t (0,03%) tartalmaz. Ezeken a gázokon kívül a levegő változó mennyiségű vízgőzt (nedvesség) is tartalmaz).
A pneumatikus elemek működése a sűrített levegő energia felhasználásán, valamint a mozgása során fellépő fizikai hatásokon alapul. Az ezeket a folyamatokat leíró törvényszerűségeket a folyadék- és gázmechanika során részletesen tanulmányozzuk.
2.1 Alapvető gázparaméterek
Nyomás. Ha valamilyen zárt légtérfogatra valamilyen mozgatható elemen, például dugattyún keresztül külső erő hat, akkor a levegőben belső nyomás jön létre, amely egyenletesen hat minden, ezt a térfogatot korlátozó felületre (2.1. ábra). Ez a rendelkezés Pascal törvényéből következik: a folyadék (gáz) külső felületére kifejtett nyomás e folyadék (gáz) minden pontjára átterjed, és minden irányban azonos.
Rizs. 2.1. A Pascal-törvény működésének illusztrációja
A belső nyomás értéke nem függ a levegő által elfoglalt térfogat alakjától, és a külső erő moduljának a dugattyú keresztmetszeti területével való elosztása eredményeként határozható meg:
P=F/S
Az SI mértékegységek nemzetközi rendszerében a nyomás mértékegysége N / m². Ezt az egységet pascalnak nevezik, és Pa-nak nevezik.
A nyomás különböző meglévő egységekben mérhető (lásd az I.2. mellékletet). A gyakorlatban azonban a pascal [Pa] mértékegységet kell használni, valamint annak származékait, például kilopascal [kPa], megapascal [MPa] stb.; A bar [bar] kivételként használatos:
1 bar = 105 Pa = 102 kPa = 0,1 MPa.
A légköri levegő nyomását a benne lévő tárgyakra és a földfelszínen légköri nyomásnak nevezzük és jelöljük. Ratm. A légkör minden pontján a légköri nyomást a fedő levegőoszlop súlya határozza meg; értéke a magassággal csökken. A légköri nyomás az időjárási viszonyoktól és a terület földrajzi elhelyezkedésétől függően változhat;
A pneumatikus rendszerekben általában sűrített levegőt használnak, a nyomás abszolút értékét Pa6s amely többszöröse a légköri nyomásnak. A technológiai nyomásszint leolvasásának kényelme érdekében a túlnyomás fogalmát használják.
túlnyomás Rizb az abszolút légnyomás értékének többletének nevezzük a légköri nyomás értékét. A légköri nyomáshoz viszonyított abszolút nyomás hiányát vákuumnyomásnak vagy egyszerűen vákuum Рvac-nak nevezzük (2.2. ábra).
Rizs. 2.2. Nyomás referenciarendszerek
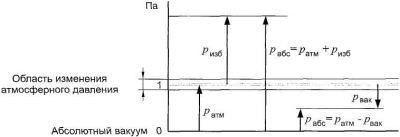
A túlnyomás mérésére szolgáló eszközöket manométereknek nevezzük. A légköri nyomás a nyomásmérő skála nullapontja.
A vákuum mérésére vákuummérőket használnak, amelyek skálája 0 és -1 bar között van; A vákuumtechnika p a6c ~ 10~10 Pa (10-5 bar) ritkítás elérését teszi lehetővé. A vákuumot és a túlnyomást egyaránt mérő műszereket manométereknek nevezzük. Vannak manométerek is az abszolút nyomás mérésére, de ezeket csak speciális esetekben használják. Az elméleti számításoknál mindig az abszolút nyomás értékét használjuk.
Hőfok. Különféle skálák léteznek a hőmérséklet mérésére (lásd az I.2. függeléket), de jelenleg ezek közül csak kettőt használnak - termodinamikus és nemzetközi gyakorlati, Kelvin (K), illetve Celsius fokban. ( °C).
A nemzetközi gyakorlati skálán 0 és 100°C a víz fagyáspontja és forráspontja (az úgynevezett fix pontok) 1,013 nyomáson. 105 Pa (1,013 bar).
Valamennyi termo- és gázdinamikai függőség magában foglalja a termodinamikai hőmérsékletet Г, amelyet az abszolút nulla hőmérséklettől mérnek, ami annak elméleti értéke, amelynél a gázok nem rugalmasak, és térfogatuk nullával egyenlő.
A termodinamikai, vagyis abszolút hőmérséklet G [K] és a nemzetközi gyakorlati skála szerinti t [°C] hőmérséklet a T = t + 273,15 összefüggéssel függ össze.
Sűrűség. Egy másik fontos paraméter, amely a gáz állapotát jellemzi, a p sűrűség [kg / m³] - az m [kg] anyag tömegének az F térfogathoz viszonyított aránya, amelyet ez a tömeg elfoglal:
P=m/V
Specifikus térfogat. Fajlagos térfogat v [m³ / kg] a sűrűség reciproka: v = 1/ρ.
2.2 A gázok alapvető fizikai tulajdonságai
Összenyomhatóság. A gáz azon tulajdonságát, hogy nyomás alatt térfogatot változtat, összenyomhatóságnak nevezzük. Az összenyomhatóságot a β térfogati tömörítési arány jellemzi, amely a térfogat egységnyi nyomásonkénti relatív változása:
Jel A képletben szereplő „mínusz” annak a ténynek köszönhető, hogy a nyomás pozitív növekedése (növekedése) az V térfogat negatív növekedésének (csökkenésének) felel meg. A β együttható reciproka a rugalmassági modulus (összenyomhatósági modulus) K tömege. [Pa].
hőmérséklet-tágulás. A hőtágulást a βt [K1] térfogati tágulási együttható jellemzi, amely a térfogat relatív változása 1 K hőmérsékletváltozás mellett:
Viszkozitás. A folyadékok és gázok azon tulajdonságát, hogy ellenállnak a folyadék vagy gáz rétegeinek nyírásának (csúszásnak), viszkozitásnak nevezzük. A viszkozitás a folyékonyság (a folyadék vagy gáz részecskéinek mobilitási foka) ellentétes tulajdonsága: a viszkózusabb folyadékok kevésbé folyékonyak és fordítva. A viszkozitás a ji dinamikus viszkozitással és a v kinematikai viszkozitással jellemezhető.
A dinamikus viszkozitási együttható β vagy belső súrlódási együttható mértékegysége pascal másodperc [Pa-s]. Használjuk a CGS-rendszer mértékegységét is [P]: 1 P = 0,1 Pa-s. A v kinematikai viszkozitási együttható mértékegysége m² / s; a CGS készletegység [St] is használatos: 1 St = 1 s m² / s = 1SI m² / s.
A viszkozitás függ a hőmérséklettől (2.3. ábra), és ennek a függőségnek a jellege folyadékok és gázok esetében eltérő: a folyadékok viszkozitása a hőmérséklet emelkedésével csökken, míg a gázok viszkozitása éppen ellenkezőleg, nő (levegő esetében ez a függőség jelentéktelen).
Rizs. 2.3. A kinematikai viszkozitás v függése a hőmérséklettől
![]()
2.3. Alapvető gáztörvények
A gáz állapotát három fő paraméter jellemzi - abszolút nyomás, abszolút hőmérséklet és sűrűség (fajlagos térfogat). Ezen gázparaméterek összefüggését állapotegyenletnek nevezzük. A gáz ideálisnak nevezett állapotát a Clapeyron-Mengyelejev egyenlet írja le
P = pRT,
ahol Р abszolút nyomás, N/m²;
p - sűrűség, kg / m³;
R a fajlagos gázállandó, J/(kg - K); általában levegőnél R = 287 J / (kg - K); T az abszolút hőmérséklet, K.
Ideális gáz olyan gáz, amelyben a molekulák között nincsenek kölcsönhatási erők, amelyeket figyelembe veszünk anyagi pontok amelynek nincs hangereje. Annak ellenére, hogy a levegő a legtöbb számára nem ideális gáz gázfolyamatok 20 MPa (200 bar) nyomást meg nem haladó nyomáson áramlik, ez az egyenlet továbbra is érvényes marad.
Ebbe az egyenletbe beírva a sűrűséget tömegen és térfogaton keresztül meghatározó képletet kapunk egy összefüggést, amely leírja m kilogramm V térfogatú ideális gáz állapotát:
mR=pV/T
Könnyen belátható, hogy bármely állandó gáztömeg esetén az egyenlet bal oldala egy állandó érték (állandó):
pV/T=állandó
Ez az egyenlet általánosítja az alapvető gáztörvényeket: Boyle - Mariotte, Charles és Gay-Lussac.
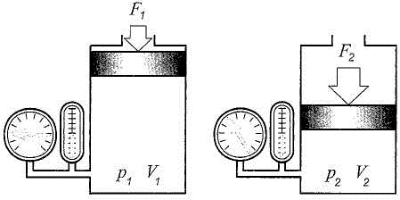
Boyle törvénye – Mariotte. Ha egy gáz abszolút hőmérséklete állandó marad, akkor egy gáz abszolút nyomásának és térfogatának szorzata is állandó érték adott gáztömeg esetén; más szóval a gáz nyomása fordítottan arányos a térfogatával (2.4. ábra).
Rizs. 2.4. Illusztráció Boyle törvénye - Mariotte
Az állandó hőmérsékleten lejátszódó gázfolyamatokat izotermikusnak nevezzük. Ha a gázsűrítés során nincs hőcsere környezet, akkor az ilyen folyamatot adiabatikusnak (adiabatikusnak) nevezzük. Ez kielégíti a Poisson-egyenletet
p V = állandó,
ahol k az adiabát Poisson-hányadosa vagy együtthatója (kitevője) (levegő esetén k 1,4).
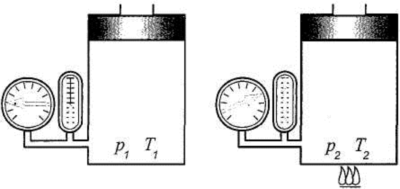
Károly törvénye. Ha egy adott tömegű gáz zárt térfogata állandó marad, akkor a gáz abszolút nyomásának abszolút hőmérsékletéhez viszonyított aránya is állandó érték; más szóval egy gáz nyomása egyenesen arányos a hőmérsékletével.
Például ha egy gázt zárt térfogatban hevítünk, a nyomása nő, lehűtve pedig éppen ellenkezőleg, csökken (2.5. ábra).
Rizs. 2.5. Károly törvény illusztrációja
Az állandó térfogatú gázfolyamatokat izokhorikusnak (izokhorikusnak) nevezzük).
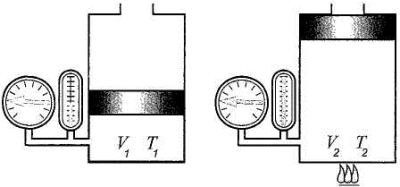
Meleg-Lussac törvénye. Ha egy gáz abszolút nyomása állandó marad, akkor egy adott gáztömeg térfogatának abszolút hőmérsékletéhez viszonyított aránya is állandó; más szóval a térfogat egyenesen arányos a hőmérséklettel.
Például állandó nyomású gáz felmelegítésekor a térfogata nő, lehűtve pedig csökken (2.6. ábra).
p = állandó V1/T1=V2/T2
Rizs. 2.6. Meleg-Lussac törvényének illusztrációja
Az állandó nyomáson végbemenő gázfolyamatokat izobárnak (izobárnak) nevezzük)*.
Mivel a gáz paraméterei egymással összefüggenek, és széles értéktartományban változhatnak, a különböző körülmények között lévő gázmennyiségek összehasonlítás céljából az ún. normál állapotokhoz vezetnek.
A normál körülmények alábbi paraméterei általánosan elfogadottak:
fizikai referencia feltételek: nyomás 1,013,105 Pa (1,013 bar), hőmérséklet 273,15 K (0°C);
műszaki referencia feltételek: nyomás 1.013.105 Pa (1.013 bar), hőmérséklet 293.15 K (20.°C).
2.4. Gázáramlás
A fentiekben olyan gázparamétereket vettünk figyelembe, mint a nyomás, hőmérséklet, sűrűség, fajlagos térfogat. A gázáramlást még egy paraméter jellemzi - az áramlási sebesség.
2.4.1. Fogyasztás
Fogyasztás - az áramlási sebesség irányára merőleges szakaszon egyenletesen mozgott anyag tömegének (tömegáram) vagy térfogatának (térfogatáram) aránya és az az időintervallum, amely alatt ez a mozgás bekövetkezik.
A szakirodalomban a térfogatáramot a latin Q (vagy Qv) betűvel jelölik. A térfogatáramot az arány határozza meg
Q=V/t
ahol Q - térfogatáram, m 3 / s; V a térfogat, m 3; itt az idő, s.
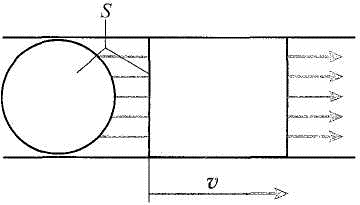
Ha a gáz áramlásáról beszélünk, például egy csővezetéken keresztül, akkor a térfogatáram a cső keresztmetszeti területének és a cső átlagos keresztmetszeti sebességének szorzataként is ábrázolható. a benne lévő gáz (2.7. ábra):
Q=vS,
ahol v az átlagos áramlási sebesség a szakaszon, m/s;
S a csővezeték keresztmetszete, m 2.
Rizs. 2.7. Térfogatáramlás
A Qm tömegáram [kg/s], ellentétben a térfogatárammal, a gáz p [kg/m³] sűrűségétől függ, és az arányból határozható meg.
Qm=pvS
Könnyen belátható, hogy a térfogat- és tömegáram között a következő összefüggés van:
Q=Qm/p
A gázt általában összenyomható viszkózus folyadéknak tekintik. A számításokat jelentősen megnehezíti annak egyidejű figyelembevétele, hogy a gáz összenyomható közeg, és mozgása során a súrlódási erők hatása nyilvánul meg. Ezért a gyakorlatban sok esetben a gázmozgási folyamatok idealizálásához folyamodnak, ami leegyszerűsíti a számításokat anélkül, hogy nagy hibákhoz vezetne.
A gázáramlás során végbemenő folyamatok lényegének megértéséhez összenyomhatatlan inviscid (ideális) folyadéknak fogjuk tekinteni.
Az anyag megmaradásának törvénye, valamint az áramlás folytonosságának (kontinuitásának) feltételezése alapján egy összenyomhatatlan folyadék egyenletes áramlásához *, azt lehet állítani, hogy a térfogatáram bármely szakaszon azonos (2.8. ábra). ).Rizs. 2.8. Folyadék áramlási sebesség változó keresztmetszetű csövön keresztül történő áramlás közben
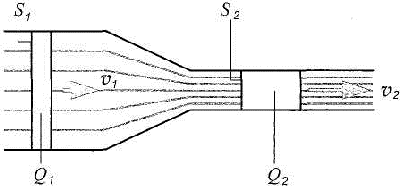
Ezt a jelenséget a folytonossági egyenlet írja le
Q 1 \u003d S 1 v 1 \u003d S 2 v 2 \u003d Q 2 \u003d const.
Ebből az egyenletből az következik, hogy a cső egy keskeny szakaszában az áramlás felgyorsul:
v 2 \u003d v 1 S 1 / S 2
2.4.2. Bernoulli egyenlet
A változó keresztmetszetű csövön áthaladó áramlás különböző pontjain végzett nyomásmérések eredményei (2.9. ábra) első pillantásra paradoxnak tűnhetnek: egy keskeny szakaszon kisebb a nyomás, mint a szélesben. . Mik ennek a jelenségnek az okai?
Rizs. 2.9. Folyadékáramlás változó keresztmetszetű csövön keresztül
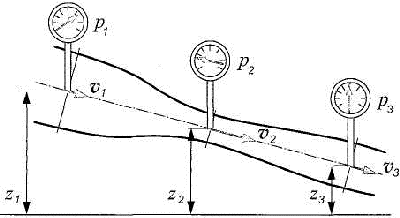
A mozgó folyadék mechanikai energiája három formát ölthet: pozícióenergia, nyomásenergia és mozgási energia. Egy ideális folyadék mozgása során az egyik energiaforma átalakulhat egy másikká, de a folyadék teljes fajlagos energiája változatlan marad. Matematikailag ezt a helyzetet a Bernoulli-egyenlet írja le
gz 1 +p 1 /p+v 1 2 /2=gz 2 +p 2 /p+v 2 2 /2= gz 3 +p 3 /p+v 3 2 /2
ahol gz a pozíció fajlagos energiája (g - 9,8 m / s 2 - a szabadesés gyorsulása); p a fajlagos nyomásenergia; v 2 / 2 - fajlagos kinetikus energia.
Így a folyadék nyomásszintjének csökkenése a cső szűk szakaszában abból adódik, hogy az áramlás felgyorsulásával együtt jár annak mozgási energiája, és ennek következtében a nyomási energia csökkenése.
Bizonyos esetekben célszerű a Bernoulli-egyenlet írási formáját használni, amelyben az egyenlet tagjainak nyomásdimenziója van:
gz 1 +p 1 +v 1 2 /2=gz 2 +p 2 +v 2 2 /2
ahol pgz a súlynyomás;
p hidromechanikus nyomás (vagy egyszerűen nyomás); pv 2 /2 - dinamikus nyomás.
A gyakorlati számítások során elfogadhatatlan az energiaveszteségek figyelmen kívül hagyása a csővezeték hosszában, valamint a helyi ellenállásoknál. Minden valódi folyadéknak és gáznak van viszkozitása, ezért a folyadék vagy gáz áramlásának energiája szakaszról szakaszra csökken a mozgásának irányában. Az energiaveszteséget számos tényező határozza meg: a csővezeték keresztmetszete és hossza, belső felületének érdessége, helyi ellenállások jelenléte, sebesség és áramlási rend, a folyadék vagy gáz viszkozitása (belső súrlódása).
A Bernoulli-egyenlet egy valódi (viszkózus) folyadék áramlására energia formájában a következő lesz:
gz 1 +p 1 /p+α 1 v 1 2 /2= gz 2 +p 2 /p+α 2 v 2 2 /2+gΣhn
Ahol α a Coriolis-együttható, figyelembe véve a sebességek egyenetlen eloszlását a keresztmetszetben
folyam; g Σhn a teljes energiaveszteség (hidraulikus veszteség).
A Bernoulli-egyenlet alkalmazható a sűrített levegő áramlására, feltéve, hogy annak sebessége v<υ, где υ — скорость звука.
2.4.3. Áramlási rendszerek
A folyadékok és gázok csövön keresztüli áramlásának két módja van: lamináris és turbulens (2.10. ábra).
Rizs. 2.10
Turbulens mód
A lamináris rendszert egy folyadék vagy gáz rendezett mozgása (rétegei) jellemzi, és a külső rétegek sebessége kisebb, mint a belsőké. Amikor a mozgás sebessége meghalad egy bizonyos kritikus értéket, a rétegek keveredni kezdenek, örvények képződnek; az áramlás turbulenssé válik, az energiaveszteségek nőnek.
Amikor a folyadék átáramlik egy csővezetéken, a laminárisból a turbulensbe való átmenet akkor figyelhető meg, amikor a cső keresztmetszetére átlagolt áramlási sebesség egyenlővé válik a kritikus V K értékkel.
Amint a kísérlet mutatja, a kritikus sebesség egyenesen arányos a folyadék v kinematikai viszkozitásával és fordítottan arányos a vágás belső átmérőjével:
Vcr=kv/d
ahol k az arányossági együttható; v a folyadék kinematikai viszkozitása, m²/s; d a cső belső átmérője, m.
Kísérletileg is igazolták, hogy bármely folyadék vagy gáz áramlási rendjének változása tetszőleges átmérőjű csövön csak a dimenzió nélküli k együttható egy bizonyos értékénél megy végbe. Ezt az együtthatót kritikus Reynolds-számnak nevezzük:
Recr= Vcrd/v
Kerek csövekhez ReK ~ 2300.
A Reynolds-szám az áramlási rendszer leírására szolgál:
Re=Vd/v=vpd/μ
A Reynolds-szám értéke lehetővé teszi a csövön keresztüli folyadékáramlás természetének megítélését: Re
Így az áramlási sebesség, a folyadék viszkozitása és a cső belső átmérőjének ismeretében lehetőség nyílik a Reynolds-szám számítással történő kiszámítására és a ReKp értékkel való összehasonlításra a folyadékáramlási rezsim meghatározására.
2.4.4. A gáz egy lyukon keresztül áramlik
A pneumatikus rendszerek kiszámításakor ismerni kell a lyukon áthaladó levegő térfogat- és tömegáramlási sebességének függőségét a bemeneti és a furat kimeneti nyomásának arányától. Ha figyelmen kívül hagyjuk a gáz környezettel való hőcseréjét és a gáz belső súrlódását, akkor áramlását izentropikusnak (adiabatikusnak) tekinthetjük.).
Az izentropikus áramlásban a tömegáramot a Saint-Venant-Wanzel képlet segítségével számítják ki:
ahol e a lyuk áramlási sebessége (figyelembe veszi a sugár összenyomását a gáz kiáramlása során;
általában kísérletileg határozzák meg); f a furat területe; π=p 1 /p 0, p 0 - bemeneti nyomás (általában pQ=const);
p 1 - kimeneti nyomás;
k - Poisson-hányados (adiabatika), levegőre k- 1,4; R a fajlagos gázállandó, általában levegő esetén R = 287 J/(kg K); T 0 - a levegő hőmérséklete a furat előtt.
Ha e képlet alapján megszerkesztjük a Qm \u003d f (n) függvény grafikonját, akkor az hasonló lesz a 2. ábrán látható pontozott görbe karakteréhez. 2.11.
Rizs. 2.11. Tömegáram Qm a nyomás függvényében π=p 1 /p 0
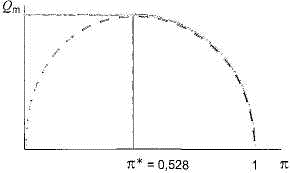
Függvény Qm =f (π) a π = 0,528 kritikus értéknél éri el a maximumát. Kísérletileg azonban megállapították, hogy a kilépő nyomás csökkenése (ami a k érték csökkenéséhez vezet) csak addig jár együtt a Qm légtömegáram növekedésével, amíg a levegő áramlási sebessége nem haladja meg a sebességet. hang - a maximális lehetséges kiáramlási sebesség speciális eszközök hiányában. A kilépő nyomás további csökkenése nem befolyásolja a tömegáramot (a 2.11. ábrán látható szilárd görbe).
0 értékhez<π<π* массовый расход подсчитывают по формуле
A gázkiáramlás folyamata π-nél< π* называют докритическим (подкритическим ), а если отношение давле-ний π>π * akkor szuperkritikus (szuperkritikus) vagy kritikus folyamatról mondanak.
A térfogatáram kiszámításához a tömegáramot sűrűséggé kell átszámítani (lásd a 2.3.1 "Áramlás" szakaszt). Mivel a lyukon való átáramláskor a levegő sűrűsége a bemeneti és kimeneti nyílásnál eltérő, azaz p \u003d f (p), akkor a térfogatáram értékei is különböznek: a bemenetnél Q V 0 \u003d Q (p 0), a kimenetnél Qv \u003d Qm (R).
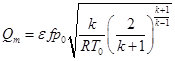
Figyelmet kell fordítani a gázok (különösen a sűrített levegő) áramlásának következő jellemzőjére: a gázok térfogatárama (például membránon keresztül) nemcsak attól függ (a folyadékok áramlási sebességétől eltérően) a nyomásesésre Δp = p 0 -p, hanem a nyomásszintre a bemenetnél p 0 (2.12. ábra).
Rizs. 2.12. Áramlási jellemzők 1 mm-es keresztmetszetű membránhoz 2
A fenti jellemzők azt mutatják, hogy Δp = 0,1 MPa (1 bar) nyomásesés és p = 1 MPa (10 bar) kezdeti sűrített levegő nyomás mellett a Q H áramlási sebesség normál műszaki körülmények között a membránon keresztül 70 l / perc, és ezzel ugyanaz az érték Δp = 0,5 MPa (5 bar) - csak 50 l / perc.
A pneumatikus szelepmozgató (pneumatikus működtető) a pneumatikus szelepmozgatók egyik fajtája. A pneumatikus aktuátor a csővezeték szerelvények automatizálására és gépesítésére szolgál. Ez az eszköz számos iparágban a legszélesebb körben alkalmazható, és számos iparágban nagyon fontos szerepet játszik a technológiai folyamatokban.
A pneumatikus aktuátort leggyakrabban a csővezeték szelepeinek távvezérlésére, zárására és nyitására, valamint a szelep helyzetének meghatározására használják. A pneumatikus szelepmozgatók mellett más típusú működtetőket is használnak, mint például elektromágneses, elektromos és hidraulikus szelepeket.
Az elektromos szelepmozgatókkal ellentétben a pneumatikus szelepmozgatókat többnyire elzáró (védő) szelepekhez használják, mivel megvannak a maguk sajátosságai, azonban bizonyos esetekben a pneumatikus működtetésű szelepek szabályozó szelepek szerepét tölthetik be.
A pneumatikus hajtóművek alkalmazása nem túl gyakori, mivel ezek használatához speciális sűrített levegős kompresszor rendszert kell beépíteni a vállalkozásba.
Dugattyús hajtások
A dugattyús hajtások olyan hengerek, amelyekben a dugattyút rugó vagy sűrített levegő hatására mozgatják. Az ilyen típusú működtetők sokféle szerelvény vezérlésére szolgálnak - csappantyúk, csapok, tolózárak, szelepek.
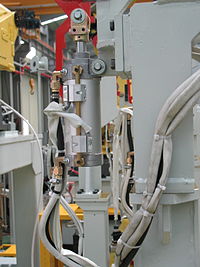
A legfontosabbak az ilyenek A dugattyús hajtások előnyei:
- Az erőkorlátozást a legegyszerűbb módon hajtják végre, nevezetesen a hajtásban lévő nyomás korlátozásával;
- Kis számú felhasznált alkatrész és a tervezés egészének egyszerűsége;
- Lehetőség nagy erők és nagy löketek elérésére a rúd egyenes vonalú löketével;
- Sebesség, ha nyomás alatti gázokat vagy sűrített levegőt használnak vezérlőközegként. Ez a minőség meghatározó a legtöbb olyan területen, ahol a szelepek dugattyús működtetőit használják.
A dugattyús hajtások feloszthatók:
- Az elrendezés módszere. Beépíthetők a szerelvények kialakításába, vagy különálló egység formájában;
- Lengő (forgó) hengeres hajtórúd nélkül vagy hajtórúddal és rögzített hengerrel;
- A kimeneti link mozgásának jellege szerint - forgó és lineáris;
- A működési ciklus szerint - kettős működésű és egyszeres működésű hajtásokhoz;
- A vezérlőközeg tulajdonságai szerint - hidraulikus és pneumatikus;
Kettős működésű aktuátorok
A kettős működésű dugattyús hajtásoknál a hátra- és előrelöketeket a vezérlőközeg hatására érik el. Az ilyen típusú meghajtók könnyen kezelhetők és vezérelhetők, egyszerű eszközzel rendelkeznek. Veszélyes termelési létesítményekben végzett munka esetén azonban további követelmények vonatkozhatnak a kettős működésű hajtóművekre. Például a következőket: abban az esetben, ha nincs vezérlőközeg, vagy vészleállítás történik, a szelep nem változtathatja meg az eddig beállított pozíciót. Ilyen esetekben a kettős működésű hajtóműveket speciális eszközökkel látják el, amelyek biztosítják az elért helyzet rögzítését. Ezeknek az eszközöknek a biztosítása azonban bonyolítja a meghajtó kialakítását.
Egyszeres működésű aktuátorok
Az egyszeres működésű hajtóművek bonyolultabb felépítésben különböznek a kettős működésű hajtóművektől, mivel rugójuk van, amely az előre löket során meghúzódik a hátramenet érdekében.
A visszahúzó rugónak rendelkeznie kell a szükséges mozgással és elegendő erővel. Erre tekintettel az esetek nagy részében ez befolyásolja azt, hogy jelentős méretű. Nagy erők esetén gyakran használnak belleville rugókat, amelyek több rugóból álló készletek, mivel az egyes belleville rugó lökete kicsi.
A főbe a dugattyús hajtás előnyei Az egyszeres működésűek magukban foglalják a rugóerő hatására történő mozgás lehetőségét vezérlőközeg hiányában is, valamint a ciklus végrehajtása közbeni sebességet.
Tól től hiányosságait megjegyezhető, hogy mind átmérőben megnövelt méretű hajtásra van szükség, mivel egyenes löketben a súrlódási erők leküzdése és a hasznos munka mellett szükség van a visszatérő rugó nyomóerejének leküzdésére, ill. a hossz mentén, ami szükséges a rugó befogadásához, amely általában a dugattyú mögött található.
Meghajtók a kimenő tengely forgó mozgásával
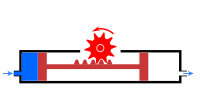
A forgó típusú szelepmozgatóknál a kimeneti szár forog, ami jellemzően negyed fordulat a szelepek működtetéséhez, vagy 90 fokos szög. Vannak olyan kialakítások is, amelyek a kimeneti összeköttetés több fordulatát hozzák létre, és szelepvezérlésre szolgálnak.
A dugattyú transzlációs mozgásának forgómozgássá alakítására, amely a hajtás kimenő tengelyét, fogaslécet és fogaskerekes fogaskereket, forgattyús mechanizmust és nagyon ritka esetekben csavaros mozgás átalakítót alkalmaz.
Integrált dugattyús hajtások
A beépített dugattyús működtetők a szeleppel megegyező kialakításúak, és közös részeik vannak ezzel a szeleppel. Az ilyen típusú meghajtók lehetnek egyirányú és kétirányú mozgásúak.
A beépített dugattyús hajtások használatát általában nagy teljesítményű erőművek, például atomerőművek impulzusbiztonsági berendezéseinek főszelepeiben végzik.
Az integrált meghajtók kompakt kialakítást hoznak létre, de csökkentik a karbantarthatóságot és megnehezítik a karbantartásukat. Ez annak a ténynek köszönhető, hogy a meghajtóhoz való hozzáférés bonyolult, és a javítási munkák elvégzéséhez szét kell szerelni a teljes szerkezetet.
A beépített egyszeres működésű dugattyús működtetők számos nyomásszabályozó pilótában is használatosak.
Fújtatóműködtetők
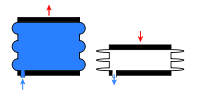
Tekintettel arra, hogy a harmonika közepes nyomás hatására megváltoztathatja hosszát, szelepek vezérlésére tervezett meghajtóként használhatók.
A csőmembránok kis mérete, valamint a használatukkal fellépő kis erők meghatározzák azokat a területeket, ahol a csőmembrán aktuátorokat alkalmazzák - ezek a kisméretű szelepek, valamint a szelepekben található különféle vezérlő (vezérlő) eszközök, valamint mint különféle relék, amelyeket például a pozícionálók szerelvényeinek vezérlésére terveztek.
Amikor a túlnyomásos csőmembránt meg kell hosszabbítani, belső üregét a vezérlőközeg ellátására használják. Ha éppen ellenkezőleg, a légrugó a nyomás növelésekor lerövidül, a közegnek a fújtatón kívül kell hatnia.
Csővezetéki szerelvények esetében a csőmembrános pneumatikus állítómű alkalmazásának legszembetűnőbb példája a termosztatikus kondenzvíz csapda, amely féltartályból készült csőmembránnal van felszerelve. A fújtatóba speciális folyadékot öntenek, amely 100 Celsius fokot meghaladó hőmérsékleten gyorsan elpárolog. Ennek a folyadéknak a gőze nyomást hoz létre a fújtató belsejében, megnyúlik, és a rajta lévő orsó bezárja a csapdafészek nyílását.
A csőmembrános működtetőket mindig egyszeres működésű működtetőként használják. A visszatérő erő a harmonika rugalmas tulajdonságainak kihasználásával jön létre. Ha ez az erő nem elegendő, egy további visszatérő rugót kell beépíteni, amely koaxiálisan helyezkedik el a harmonika külső vagy belsejében.
A csőmembrán működtető szerkezetek fő hátrányai közé tartozik a korlátozott ciklusélettartam, az alacsony generált erő, az alacsony löket, valamint a csőmembrán javításának céltalansága és lehetetlensége, aminek következtében meghibásodása esetén a szelepmozgató teljes harmonikaszerelvénye szükséges. cserélendő.
Forgólapátos hajtások
A forgó hajtóműben a kimenő tengely azért forog, mert a lapát egyik oldala, amely mereven kapcsolódik a kimenő tengelyhez, a vezérlőközeg által kifejtett nyomásnak van kitéve.
Megkülönböztethetők az egylapátos hajtások, amelyeknél a kimenő tengely elfordulási szöge elérheti a 180 fokot, és a kétlapátos hajtások, amelyeknél ez a szög valamivel több, mint 90 fok.
Feltételezve, hogy mind az egylapátos, mind a kétlapátos működtetőket ugyanazon a vezérlőnyomáson és azonos méretű lapáttal használják, a kétlapátos működtető által termelt nyomaték körülbelül kétszerese az egylapátos működtetőének.
Fontos tényező a meghajtóház tömítettségének és a penge mozgatható csatlakozásának biztosítása, mivel itt a hornyolt rés meglehetősen nagy hosszúságú. Ezt a rendszert hidraulikus hajtásrendszerekben is használják forgó hidraulikus motorokként, amelyeket lapátos motoroknak is neveznek.
Membrános működtetők
A membrán működtető egy kamra, amelyet egy membrán két üregre oszt. A hajtott láncszem mozgása folyadék vagy gáz hatására egy fémből, gumiból vagy polimer anyagból (fluoroplasztikus, polietilén stb.) készült rugalmas (rugalmas) membránra jut.
A munkaközeg membránra nehezedő nyomása következtében létrejövő erő a tartókorong és a rúd által alkotott gombára továbbítódik. A rúd mozgása transzlációs, a membrán kihajlásának és a rúd löketének értékét a mozgatható hajtásrendszer egyensúlyi állapota határozza meg, melynek elemei a membrán és a gomba.
A rendszer erőkiegyenlítése ezt követően a membránra nehezedő vezérlőnyomás által létrehozott erő, valamint a rúdra ható ellenállási erők hatására valósul meg (beleértve a rugalmas alakváltozásból eredő erőt is). a membrán).
Ahhoz, hogy a rúd mindkét irányba tudjon mozogni, a rendszer erőzárása terhelés vagy kiegyenlítő rugó segítségével történik. Használnak rugó nélküli hajtásokat is, amelyeknél a mozgórendszer kiegyensúlyozása úgy történik, hogy a levegő az ellenkező oldalról nyomja a membrántömböt.
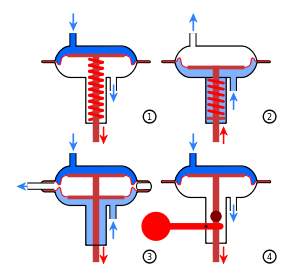
A membránműködtetők működésének sematikus diagramja a magyarázó ábrán látható:
1 - rugós közvetlen működés;
2 - rugó fordított működése;
3 - rugó nélküli;
4 - emelőkaros rakomány.
BAN BEN kar-terhelésű membránhajtások a membránon létrejövő erőt a terhelés súlyának állandó ereje egyensúlyozza ki.
BAN BEN rugós membrános működtetők- változó erő alkalmazása, amely arányos a rúd löketével.
BAN BEN rugó nélküli membrános működtetők a membránblokkon ható erő (nyomás) egyik oldalról és a másik oldalról is szabályozható.
A csővezetéki szerelvényeknél a membrános működtetőt főként gumi (egyes esetekben szövetrétegű) membránnal működtetik, öntött, laposra szerelt vagy lapos.
A membránról a rúdra való erőátvitel minden esetben egy tartótárcsa segítségével történik, amely a membrán tartóplatformját képezi. A sebességváltó kar használatával a membránműködtető szerkezet forgó elzáró szerkezetű szelepekben, azaz csappantyúkban is használható.
A membrán aktuátor a legszélesebb körben alkalmazható a szabályozószelepekben. Használata során a dugattyút a parancsjel által meghatározott pozícióba mozgatják és telepítik. Sokkal ritkábban a rugós működtetők mellett rugó nélküli működtetőket használnak a csővezeték szelepeiben.
A szabályozószelepekben való felhasználáson túl a rugó nélküli és rugóterhelésű membrános működtetők elzáró- és gömbszelepekben egyaránt használhatók. Ebben az esetben azonban ezekre az eszközökre további követelmény vonatkozik - a löket végén olyan erőt kell létrehozni, amely biztosítja a zárt elzáróelem tömítését a szelepben.
A pneumatikus hajtóművek előnyei
A pneumatikus hajtóművek előnyei közül a következőket lehet megjegyezni:
- A hidraulikus működtetőkkel ellentétben a pneumatikus hajtóművek kevésbé érzékenyek a környezeti hőmérséklet változásaira, mivel a hatásfok kevésbé függ a munkagáz (munkaközeg) szivárgásától. Emiatt a munkaközeg viszkozitásának változása és a pneumatikus berendezések részei közötti hézagok változása nincs különösebben komoly hatással a pneumatikus működtető szerkezet működési paramétereire. Emiatt a pneumatikus hajtás kényelmesen használható a kohászati vállalkozások forró üzemeiben.
- A hidraulikus hajtáshoz képest a pneumatikus hajtás több kilométeres távolságra képes mozgási energiát átvinni, aminek köszönhetően fővonalként használható bányákban és bányákban.
- A munkakörnyezet és a tűzbiztonság semlegessége, melynek köszönhetően a pneumatikus hajtás a vegyiparban és a bányákban is üzemeltethető.
- Nagy reakciósebesség, valamint a pneumatikus motorok nagy forgási sebessége, amely percenként akár több tízezret is elérhet.
- Jövedelmezőség és egyszerűség, ami a munkagáz olcsóságának köszönhető.
- A rendszer egyszerűsítésének lehetősége sűrített gázpalack energiaforrásként történő felhasználásával. Az ilyen típusú rendszereket időnként a squib helyett használnak, vannak olyan rendszerek, amelyekben a nyomás a hengerben elérheti az 500 megapascalt.
- Az elektromosakhoz képest kisebb a hajtóművek súlya.
- A hidraulikus hajtáshoz képest - kisebb a munkafolyadék súlya. Ez a tényező lényeges a rakétatudomány számára.
- A hidraulikus hajtástól eltérően nincs szükség a munkafolyadék (levegő) visszavezetésére a kompresszorba.
A pneumatikus hajtóművek hátrányai
A pneumatikus működtetők hátrányai közül meg kell említeni:
- A hajtórúd forgásának szabályozása érdekében speciális drága eszközöket - pozícionálókat - kell használni.
- Ipari sérülések vagy a csővezetékek robbanásszerű megszakadásának lehetősége, aminek következtében az ipari pneumatikus működtetőkben kis üzemi gáznyomásokat alkalmaznak, amelyek általában nem haladják meg az egy Megapascalt. Ismeretesek azonban olyan rendszerek, amelyekben az üzemi nyomás eléri a 7 megapascalt, például atomerőművekben. Ahol nincs ilyen probléma (repülőgépeken és rakétákon), vagy a rendszerek kicsik, ott a nyomás elérheti a 20 MPa-t vagy azt is.
- Alacsony simaság és pontosság.
- Alacsonyabb hatásfok, mint a hidraulikus hajtásé.
- Az elektromoshoz képest magasabb a pneumatikus energia költsége (körülbelül 3-4-szer). Ez fontos pneumatikus hajtás használatakor, például bányákban.
- A munkagáz hűtése és melegítése pneumatikus motorokban expanzió, kompresszorokban pedig kompresszió során. Ez a hátrány a termodinamika törvényeiből adódik, és olyan problémákhoz vezethet, mint a vízgőz lecsapódása a munkagázból, aminek következtében meg kell szárítani, valamint a pneumatikus rendszerek befagyásának lehetősége.
Hidraulikus hajtások
A fent felsorolt szelepmozgatók mindegyike megvalósítható folyadékkal. Leggyakrabban az olajat használják munkaközegként.
Bizonyos esetekben az ilyen eszközök hatékonyabbak, mint a pneumatikus működtetők, például a forgólapátos működtetők lényegesen hatékonyabbak, ha olajjal munkaközegként használják őket. Ez annak a ténynek köszönhető, hogy jelentős légszivárgás lehetséges a résen keresztül.
A hidraulikus hajtások előnyei
A hidraulikus hajtások fő előnyei a következők:
- Más típusú hajtásokhoz képest leegyszerűsítettük a hidraulikus hajtás fő alkatrészeinek elrendezését az egységek és gépek belsejében.
- Egyidejű átvitel több hajtásra, az erők egyenletes elosztásának lehetősége.
- Gyors és gyakori váltás lehetősége forgó és oda-vissza irányú és közvetlen mozgások során.
- Egyszerűség a különböző típusú mozgások végrehajtásában - forgó, forgó, transzlációs.
- Nagy teljesítmények és erők megszerzésének lehetősége az átviteli mechanizmus kis súlyával és kis méreteivel.
- Dörzsölő felületek önkenése olyan esetekben, amikor szintetikus és ásványi olajokat használnak munkafolyadékként.
- Magas átviteli teljesítmény a hajtás egységnyi tömegére vetítve. Így egy hidraulikus gép tömege körülbelül 10-15-ször kisebb, mint egy azonos teljesítményű elektromos gép tömege.
- Megbízhatóság működés közben.
- Egyszerű automatizálás és kezelés.
- A hidraulikus hajtás kisebb térfogati szivárgásokat hoz létre a dugattyú-henger interfészeken és a tömszelencén keresztül.
- A hidraulikus működtetők jelentősen nagyobb nyomást tesznek lehetővé a munkaközegben. Ennek eredményeként kisebb minták használhatók.
- A hidraulikus működtetők nem okoznak lökéseket a dugattyúlöket végén. Ennek oka a hidraulikus hajtások alacsonyabb dugattyúsebessége. A hidraulikus hajtásokban a munkatestek alacsony mozgási sebessége azonban bizonyos esetekben hátrányuk lehet.
- Ugyanebből az okból a hidraulikus hajtásoknál a dugattyú vagy a hidraulikus motor tengelyének mozgása egyenletesebb, míg a pneumatikus hajtás működése gyakran a dugattyú lüktető mozgásával jár együtt a nagyobb munkagázsebesség miatt egy megapascalt meghaladó nyomáson. .
A hidraulikus hajtások hátrányai
A hidraulikus hajtások hátrányai közül érdemes megemlíteni:
- Az olajszivárgás miatt a termelő létesítmények szennyezettek, ráadásul az olaj tűzveszélyes;
- A hidraulikus működtetők jellemzően alacsonyabb dugattyúsebességgel működnek. Ez a hajtásvezérlő rendszer tápvezetékeinek nagy hidraulikus ellenállásának köszönhető.
- A hajtásvezérlő rendszerhez drágább és nagyobb berendezéseket - szivattyúállomást - kell vásárolni, míg a pneumatikus hajtásokhoz kompresszorállomásra van szükség.
- Az elektromos és pneumatikus hajtásokkal összehasonlítva lehetetlen a hidraulikus energia hatékony átvitele nagy távolságokra. Ennek oka a hidraulikus vezetékek egységnyi hosszonkénti nagy nyomásvesztesége.
- A munkafolyadék viszkozitása és ennek megfelelően a hidraulikus hajtás működési paraméterei a környezeti hőmérséklettől függenek.
- A hidraulikus rendszert védeni kell a levegő behatolásától, ami ha jelen van, a munkafolyadék felmelegedéséhez, nagy hidraulikus veszteségekhez és a hidraulikus hajtás instabil működéséhez vezet.
- Működés közben biztosítani kell a munkafolyadék tisztaságát. Ez annak köszönhető, hogy ha nagy mennyiségű csiszolószemcsét tartalmaz, akkor a hidraulikus berendezések alkatrészei gyorsabban elhasználódnak, nőnek a hézagok és a rajtuk áthaladó szivárgások, és ennek következtében csökken a térfogati hatékonyság.